9 Механизация производственных процессов
9.1 Автоматизация процесса обмывки тележек
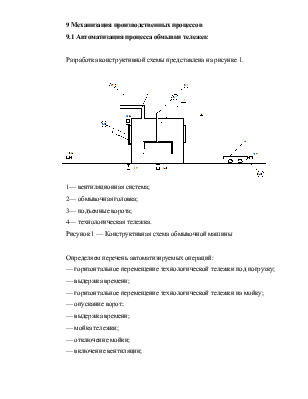
Разработка конструктивной схемы представлена на рисунке 1.
1— вентиляционная система;
2— обмывочная головка;
3— подъемные ворота;
4— технологическая тележка.
Рисунок 1 — Конструктивная схема обмывочной машины
Определяем перечень автоматизируемых операций:
— горизонтальное перемещение технологической тележки под погрузку;
— выдержка времени;
— горизонтальное перемещение технологической тележки на мойку;
— опускание ворот;
— выдержка времени;
— мойка тележки;
— отключение мойки;
— включение вентиляции;
— подъем ворот;
— отключение вентиляции;
— возвращение технологической тележки в исходное состояние.
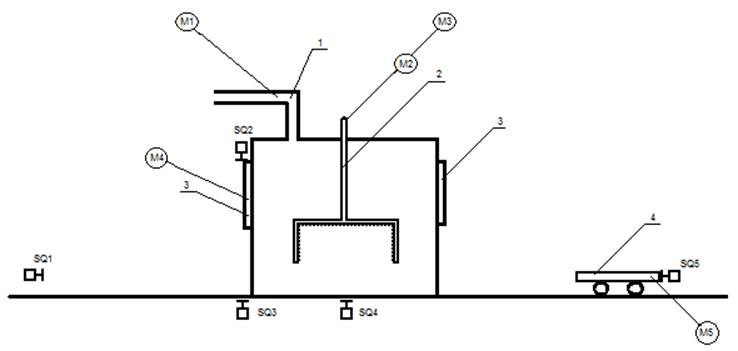
Размещаем на конструктивной схеме силовые приводы:
— вентиляция осуществляется при включении электродвигателя М1;
— насос для подачи моющего раствора приводится в действие электродвигателем М2;
— насосная установка приводится в действие электродвигателем М3;
— подъем и опускание ворот осуществляется электромеханическим приводом с электродвигателем М4;
— технологическая тележка перемещается электромеханическим приводом с электродвигателем М5.
Размещаем на конструктивной схеме концевые выключатели в крайних точках перемещения элементов устройства, а также там где их функции должны приостанавливаться.
Устройства автоматики непосредственно управляющие силовыми приводами:
— электродвигатель М1 (нереверсивный) управляется электромагнитным контактором — КМ1;
— электродвигатель М2 (нереверсивный) управляется электромагнитным контактором — КМ2;
— электродвигатель М3 (нереверсивный) управляется электромагнитным контактором — КМ3;
— электродвигатель М4 (реверсивный) управляется электромагнитными контакторами: КМ4 при опускании ворот, КМ5 при подъеме ворот;
— электродвигатель М5 (реверсивный) управляется электромагнитными контакторами: КМ6 при перемещении технологической тележки влево, КМ7 при перемещении технологической тележки вправо.
Составляем таблицу соответствия автоматизируемых устройств.
Каждая производственная операция характеризуется порядковым номером, наименованием, фазой — Н - начало, П - продолжение, З - завершение. Эта информация указывается в графах 1-3 таблицы 17.
Входные переменные обозначаются Х:
— Х1=1 при замыкании SQ1;
— Х2=1 при замыкании SQ2;
— Х3=1 при замыкании SQ3;
— Х4=1 при замыкании SQ4;
— Х5=1 при замыкании SQ5;
— Х6=1 при замыкании SВ1.
Если концевой выключатель не замкнут, то Х=0. Эта информация указывается в графах 4-9.
Входные сигналы вырабатываемые устройствами выдержки времени обозначим Т1 и Т2. Т1=0 и Т2=0 до срабатывания устройства обеспечивающего выдержку времени. Т1=1 и Т2=1 после срабатывания этого устройства. Эта информация указывается в графах 10-11.
Составляем десятичные шифры входных сигналов автомата. Десятичные шифры получаются путем перевода в десятичную форму двоичного числа, характеризующих совокупность входных сигналов автомата. Эта информация указывается в графе 12.
Определяем состояния автомата. Состояния автомата это часть рабочего цикла, характеризующаяся неизменными входными, выходными и промежуточными (если они есть) сигналами автомата, обозначается — А. Эта информация указывается в графе 13.
Для того чтобы различать между собой состояния автомата с одинаковым сочетанием входных сигналов, необходимо дополнительно ввести промежуточные переменные. Их количество определяется числом повторений десятичных шифров с одинаковым значением. В данном случае требуется две переменные Y1 и Y2. Эта информация указывается в графах 14-17.
Для того чтобы устройство обеспечивающее выдержку времени сработало, после окончания заданного интервала времени, необходимо чтобы в течении всего этого интервала и некоторого времени после него на вход устройства поступал сигнал равный единице. Эта информация указывается в графах 18-19.
Выходные сигналы автомата обозначаются Z. Они соответствуют устройствам автоматики, непосредственно управляющим силовыми приводами. Эта информация указывается в графах 20-24.
Составление логических функций.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.