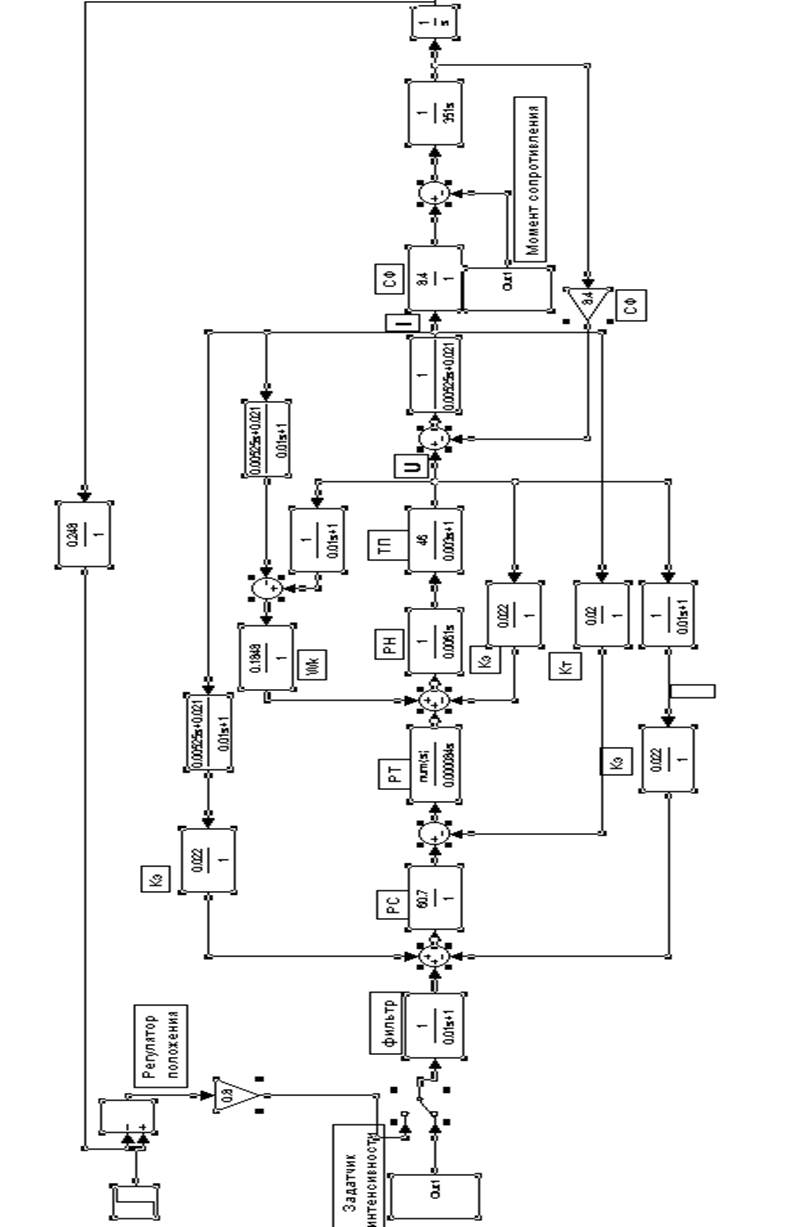
10 Разработка структурной схемы
Определим индуктивность якорной цепи
 , где UН , nН , IН -
каталожные данные двигателя, р – число пар
полюсов,
, где UН , nН , IН -
каталожные данные двигателя, р – число пар
полюсов,
b - коэффициент, учитывающий наличие компенсационной обмотки.

Определим сопротивление якорной цепи
![]() ,
,
Определим электромагнитную постоянную времени якорной цепи
 ,
,
Определим коэффициент СФ
 ,
,

Передаточную функцию тиристорного преобразователя представим в виде
 ,
,
где  ,
,
EТП – э.д.с. тиристорного преобразователя ,
UY max – максимальное напряжение управления на входе тиристорного преобразователя,
Tm - инерционность тиристорного преобразователя
Принимаем Тμ=0,003

где , UСАР - напряжение в системе автоматического регулирования (в данном случае10 В),
Iн- номинальный ток привода,
 -коэффициент
обратной связи по току
-коэффициент
обратной связи по току
 -коэффициент
обратной связи по скорости (э.д.с.)
-коэффициент
обратной связи по скорости (э.д.с.)
 -коэффициент
обратной связи по положению
-коэффициент
обратной связи по положению
Примем
![]() с
-постоянная времени фильтра
с
-постоянная времени фильтра
Синтез СПР
При синтезе САУ используем общепринятое упрощение, заключающееся в пренебрежении влиянием внутренней обратной связи по противоЭДС двигателя. В этом случае структурная схема заданной части будет представлять собой последовательное соединение типовых звеньев и датчики обратных связей. Количество контуров регулирования следует выбрать равным количеству обратных связей.
Регулятор напряжения:

![]() не
компенсируемая постоянная времени.
не
компенсируемая постоянная времени.
 ,
,
 .
.

Регулятор тока:

Передаточную функцию напряжения урезаем до первого порядка:

Пусть ![]()
 ,
,


Регулятор скорости:
Передаточную функцию тока урезаем до первого порядка:
 где
где![]()

Из
условия ![]() находим
находим
 –
делаем ее реализуемой.
–
делаем ее реализуемой.
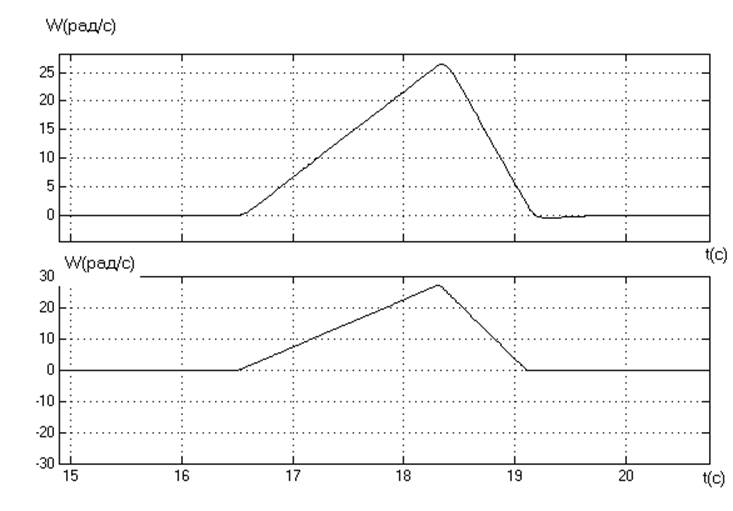
11 Построение переходных процессов одного цикла работы электропривода
Кривая изменения скорости:
Верхний график – тахограмма работы привода, нижний – тахограмма построенная в п.7

Тахограмма третьего пропуска в увеличенном масштабе:
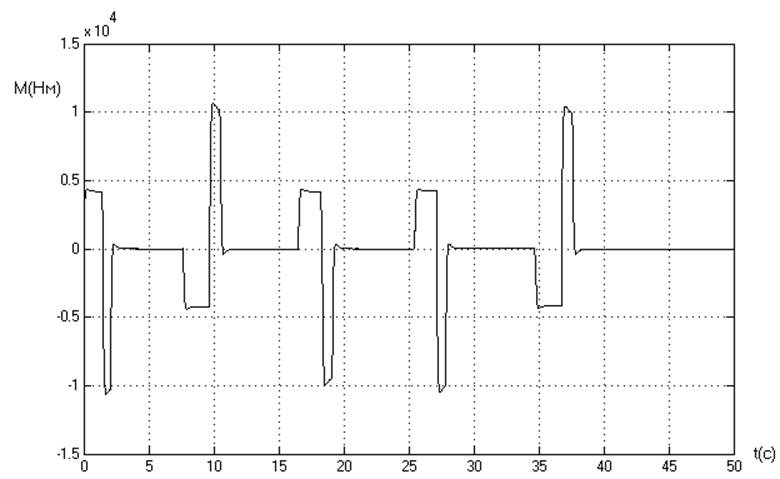
Кривая изменения момента:
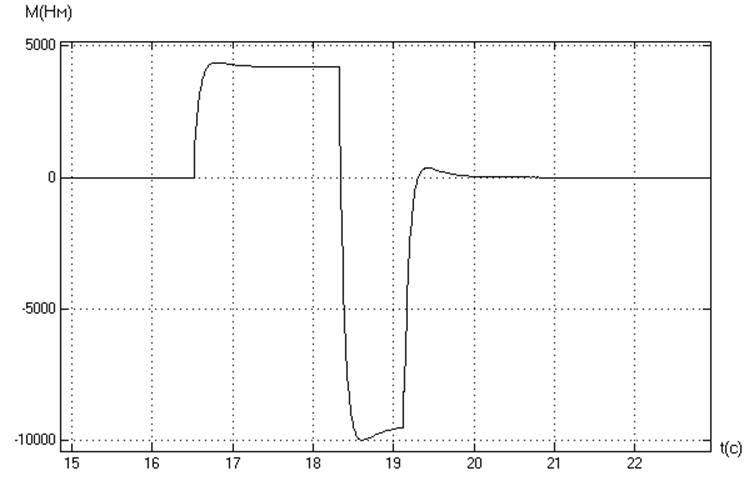
Кривая изменения момента при третьем пропуске в увеличенном масштабе:
Кривая изменения тока:
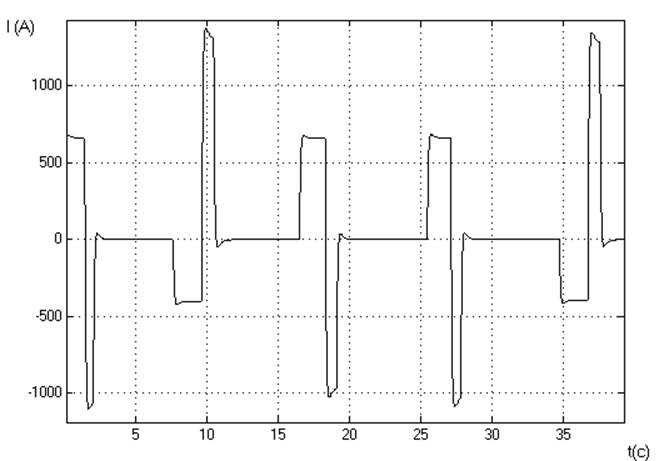
Кривая изменения тока при третьем пропуске в увеличенном масштабе:
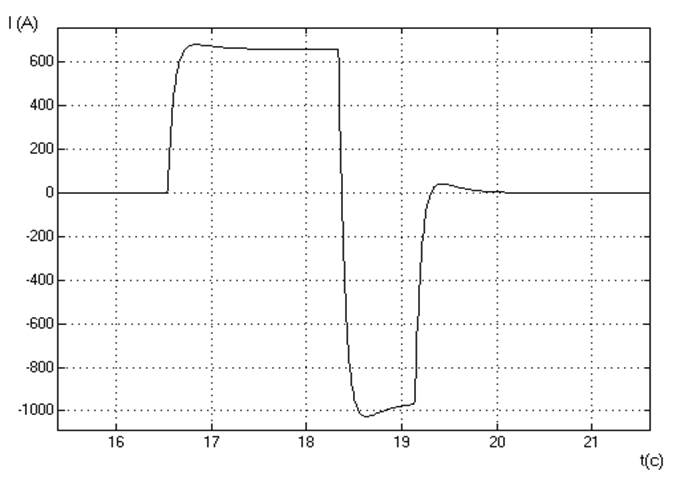
График изменения угла поворота вала двигателя при отключенном РП:
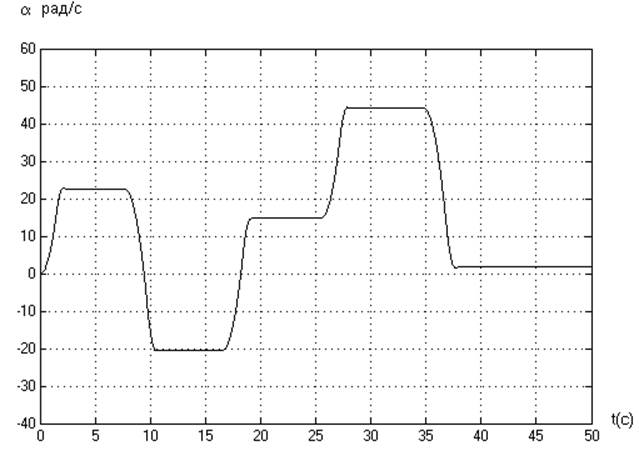
График изменения угла поворота вала двигателя при включении РП :
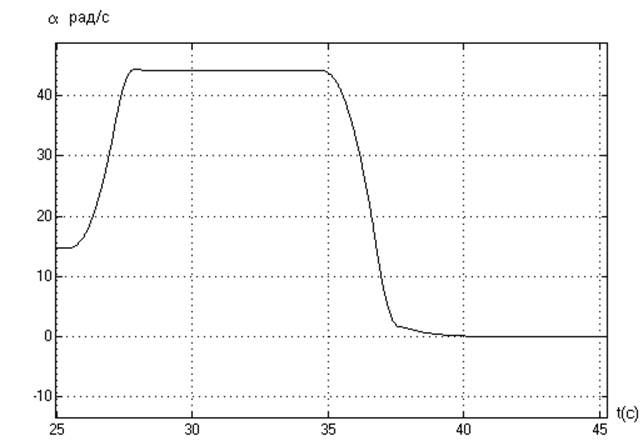
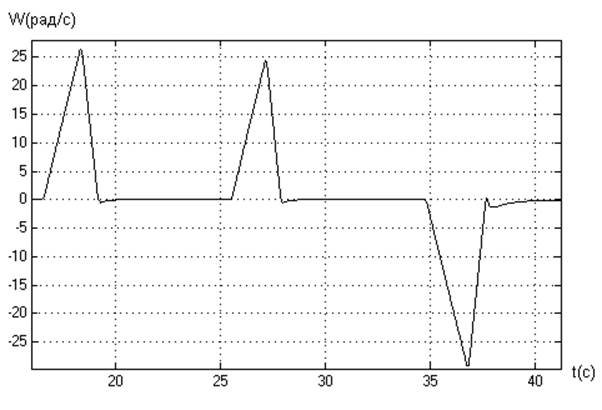
График изменения скорости вала двигателя при включении РП после завершения цикла прокатки:
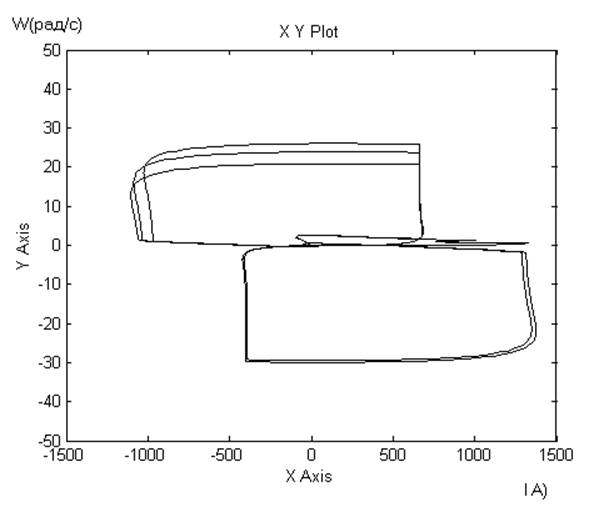
Фазовый портрет:
13 Уточненная проверка работоспособности электропривода по условиям перегрузки и нагревания двигателя
 |
 |
Найденный Mн при ПВ=60% не превышает Mн=4100 Нм, который допускается. Следовательно, рассматриваемый двигатель подходит по условиям перегрева.
Вычислим погрешность, вносимую при приближенной оценке работоспособности:
 погрешность
при использовании метода эквивалентного тока.
погрешность
при использовании метода эквивалентного тока.
 погрешность
при использовании метода эквивалентного момента
погрешность
при использовании метода эквивалентного момента
Следовательно, можно сделать вывод, что погрешность при использовании метода эквивалентного тока меньше. И его использование предпочтительнее.
14. Оценка энергетической эффективности электропривода
Расчет коэффициента мощности привода за цикл.
За цикл происходит 5 перемещений. Определим углы управления при этих перемещениях. Для этого воспользуемся графиком напряжения на выходе ТП.
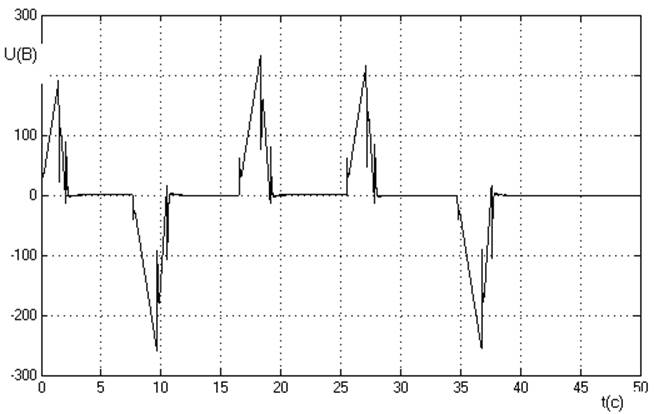
Найдем значения коэффициента мощности при различных пропусках:

Следует отметить, что найденное значения коэффициента мощности приближенное. Но оно позволяет сделать вывод о том, что привод работает с небольшим коэффициентом мощности.
Очевидно, что коэффициент мощности невысок из-за использования управляемого реверсивного
тиристорного преобразователя.
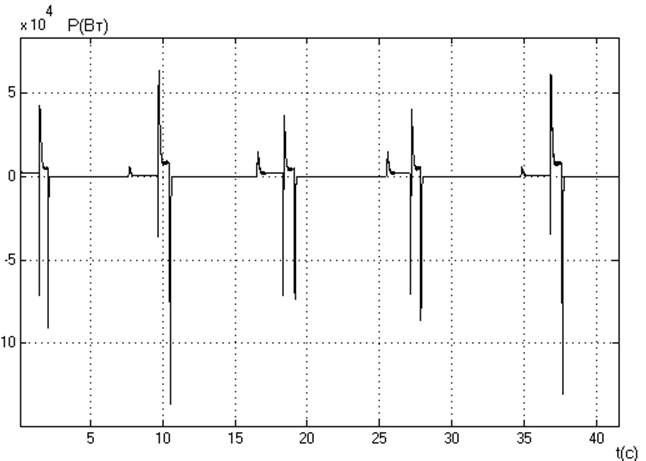
Построим график мощности P=UI за цикл:
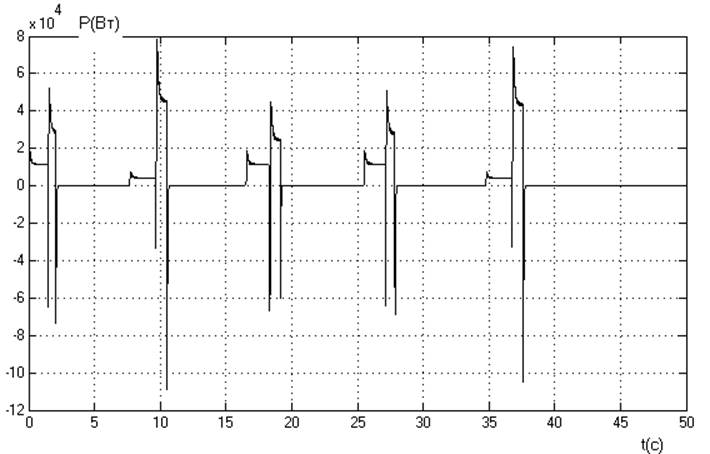
График потерь Pп=I2Ra
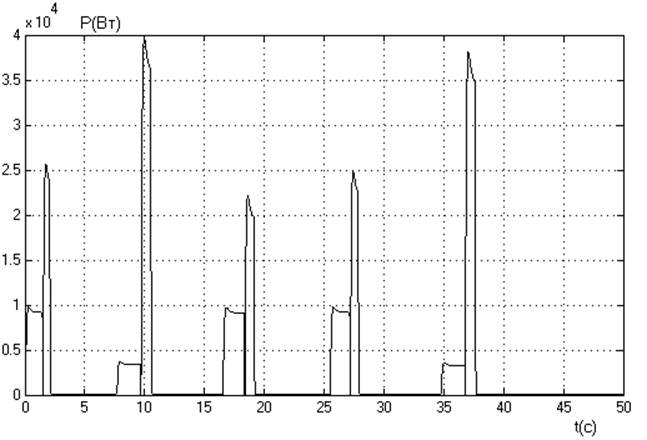
График полной мощности Pполн=P-Pп
Приближенный оценка КПД привода:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.