 … (23)
… (23)
 В·с
В·с
 В-1·с-1
В-1·с-1
 рад-1
рад-1 Исполнительный механизм – сложное электромеханическое устройство, при построении математической модели которого (передаточной функции) должны быть учтены все устройства, входящие в исполнительный механизм и особенности их работы.
Динамический расчет служит для анализа динамических свойств системы, построенной на заданных элементах.
Расчетная схема исполнительного механизма представлена на рис.7.

Рис.7. Расчетная схема исполнительного механизма..
На схеме приняты следующие обозначения:
UУ – напряжение управления, поступающее от усилителя на двигатель;
Мдв – момент, создаваемый на валу исполнительного двигателя;
Мс – момент сопротивления движения;
kм – коэффициент пропорциональности между напряжением и моментом, рассчитывается по формуле:
 … (24)
… (24)
kΩ – коэффициент пропорциональности между напряжением и скоростью;
i – передаточное число редуктора;
η – КПД редуктора;
JДВ* - момент инерции исполнительного двигателя и передаточного механизма, приведенный к выходному валу, рассчитывается по формуле:
 … (25)
… (25)
ωн* - скорость вращения нагрузки, приведенная к выходному валу;
В приводах антенных установок валы передаточных механизмов связаны с объектом управления муфтами, которые имеют определенную конструктивную жесткость, которая характеризуется коэффициентом упругого скручивания:
CУ – коэффициент упругого скручивания, примем значение коэффициента CУ=500 Н·м/рад;
α – угол поворота объекта управления;
p – оператор Лапласа, p=jω.
Данной расчетной схеме соответствует следующая передаточная функция:
 … (26)
… (26)
где
 …
(27)
…
(27)
 … (28)
… (28)
 … (29)
… (29)


Таким образом, передаточная функция имеет следующий вид:

Для проверки устойчивости системы на ее вход подается единичный скачок и оценивается переходный процесс.
Расчетная схема привода антенн представлена на рис.8.
Рис.8. Расчетная схема привода антенн.
Из статического расчета:
КИР = 36 В;
КУ = 49,6 рад-1
Переходный процесс рассматриваемой системы представлен на рис.9.
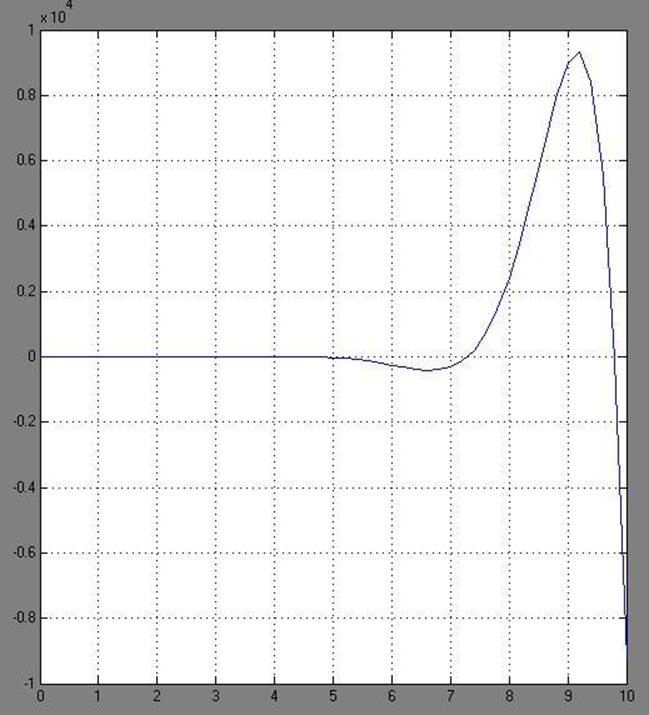
Рис.9. График переходного процесса.
Полученный переходный процесс является расходящимся колебательным.
В результате анализа динамических свойств системы, построенной на выбранных элементах, приходим к выводу, что требуется выполнять коррекцию ее динамических свойств.
8. Построение корректирующего звена.
Построение корректирующего звена осуществляется методом логарифмических амплитудно-частотных характеристик (ЛАЧХ).
Метод ЛАЧХ позволяет осуществить синтез параметров корректирующего устройства для линейных систем автоматического управления.
Процесс синтеза включает в себя следующие этапы:
1. Построение желаемой амплитудной логарифмической характеристики (ЛАХ) на основе требований, предъявляемых к системе управления.
2. Построение располагаемой ЛАХ (характеристики системы, построенной на выбранных элементах).
3. Определение вида и параметров корректирующего устройства.
4. В целом оценка динамических свойств системы с коррекцией.
5. Техническая реализация корректирующего устройства.
8.1. Построение желаемой ЛАХ на основе требований, предъявляемых к системе управления.
Построение желаемой ЛАХ начинается с построения запретной области.
Запретная область в низкочастотной части желаемой ЛАХ строится по контрольной точке, абсцисса и ордината которой определяются по формулам:
 …
(30)
…
(30)
 … (31)
… (31)
где АК – амплитуда воздействия, определяется по формуле:
 …
(32)
…
(32)

ХДоп – допустимая ошибка, определяемая по формуле, равна допустимой ошибке измерителя рассогласования ХИР Доп.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.