Запретная область
в низкочастотной части строится по контрольной точке ![]() на
основании выражения для частоты
на
основании выражения для частоты ![]() и ординаты
и ординаты ![]() :
:


Для того чтобы система была устойчива, нужно выполнить следующие условия:
- ЛАХ должна пересекать уровень 0 дБ с наклоном -20 дБ/дек;
-
ЛАХ
системы должна лежать выше контрольной точки ![]() +3дб/дк;
+3дб/дк;
- ЛАХ должна пересекать уровень 0 дБ раньше, чем ЛФХ достигнет значения -180°.
Точка пересечения запретной зоны оси абсцисс называется базовой частотой и определяется выражением
 .
.
Для упрощения реализации корректирующего звена увеличим зону низких частот с поднятием желаемой ЛАХ до 63 дб. В рассматривая системе при частоте равной 3.322 рад/с происходит первый изгиб на -40 дб/дк, по достижению частоты 51.28 рад/с происходит излом на -20 дб/дек. ЛАХ пересекает ось абсцисс на частоте среза равной 213 рад/с.Последний излом происходит на частоте равной 389 рад/с на -40 дб/дек.
В результате этих изменения запишем передаточную функцию скорректированной системы:
Построим картину переходного процесса (рис.14) для скорректированной системы в программе MatLAB. Время переходного процесса равно 1.5с, а величина перерегулирования равна 30%. ЛАХ желаемой, располагаемой функции и корректирующего звена изображен в приложении 1. ЛФХ желаемой функции изображен в приложении 2.

Рис.14 Переходной процесс скорректированной системы
Как видно из рисунка переходной процесс является устойчивым и удовлетворяет требованиям технического задания.
8. Синтез корректирующего устройства
Корректирующее устройство должно быть реализовано на операционном усилителе, т.к. требуется увеличение коэффициента усиления. Передаточная функция корректирующего устройства имеет следующий вид:
Передаточную функцию этого вида можно реализовать на одном операционном усилителе. Схема корректирующего звена показана на рис 15.
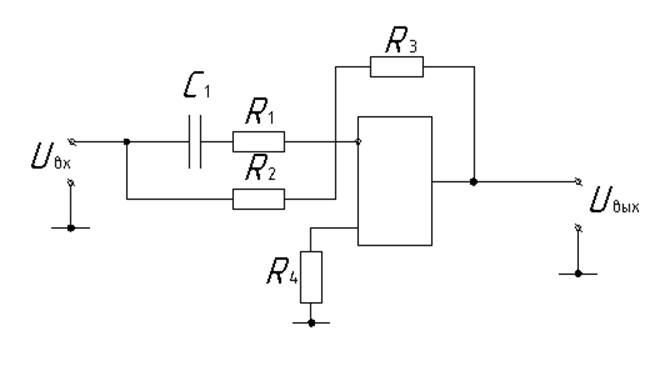
Рис.15 Схема корректирующего устройства
Коэффициент передачи и постоянные времени связаны с элементами принципиальной электрической схемы следующими соотношениями:
 ,
,
 ,
,![]() ,
, ![]() ,
,
В нашем случае постоянные времени будут равны:
![]() ,
, ![]() .
.
Поскольку число
уравнений превышает число неизвестных, то целесообразно задаться значениями сопротивления
![]() .
.
Принимаем ![]() , тогда
, тогда ![]() ,
, ![]() ,
, ![]() ,
,
Проверим:
 ,
, 
Заключение
Задачей курсового проекта является проектирование следящей САР на основе электродвигателя переменного тока с заданной мощность. Исходя из оптимальных параметров наилучшим образом подошел двигатель переменного тока ЭМ-25.
Был выбран объект управления - аэродинамический руль. Были рассчитаны основные параметры редуктора. Новые значения результирующего и эквивалентного моментов не превысили величин пускового и номинального момента.
Была построена аппроксимированная механическая характеристика двигателя с точкой максимума диаграммы нагрузки.
Произведенный динамический расчет системы показал, что система является неустойчивой и необходимо осуществить синтез корректирующего звена на операционных усилителях с применением активных цепей коррекции. Спроектированный электропривод удовлетворяет исходным требованиям ТЗ.
Список литературы
1. Шишлаков В.Ф. “Проектирование электронных усилительных устройств систем автоматического управления”, СПбГУАП, 2005 г.
2 . Лекции по курсу “Проектирование электропривода”, СПбГУАП, 2006 г
3. Герман В.Г., Земляков Н.Д.Автоматизированные приводы летательных аппаратов. Выбор электродвигателя. Учебное пособие. Л:1991г
4. Гусев С.А., Шишлаков В.Ф.Синтез систем автоматического управления. Методические указания к курсовому проектированию СПБГУАП,2006 г.
5. Л.С. Бойко, А.З. Высоцкий, Э.Н. Галиченко, Ю.И. Кобус. Редукторы и мотор-редукторы общемашино-строительного применения. Издательство «Машин издат» 1984г
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.