1)Максимальное значение пускового момента должно быть меньше пускового момента двигателя.
 , где:
, где: ![]() - уточненное
передаточное отношение редуктора; h - КПД редуктора; Jq – момент инерции редуктора.
- уточненное
передаточное отношение редуктора; h - КПД редуктора; Jq – момент инерции редуктора.

2)Величина эквивалентного момента должна быть меньше номинального момента на валу исполнительного двигателя.
 ,
,

Результаты проверки показали, что выбранный двигатель и рассчитанный редуктор удовлетворяет условиям пригодности исполнительного двигателя.
Кинематическая схема редуктора изображена на рис.3
Эскиз конструкции электродвигателя ЭМ-25 представлен на рисунке 4.
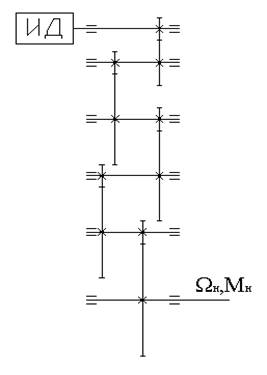
Рис.3 - Кинематическая схема редуктора.
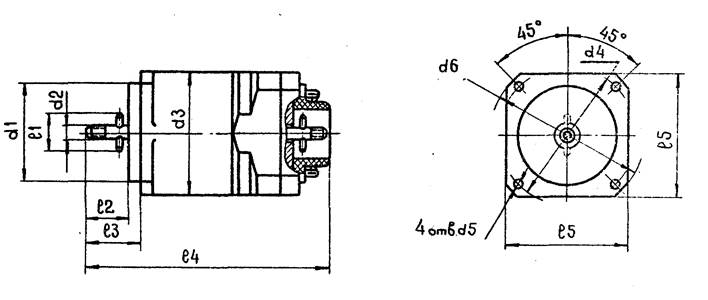
Рис.4 Эскиз конструкции электродвигателя ЭМ-25
4. Построение механической характеристики исполнительного двигателя.
Двухфазные асинхронные двигатели имеют нелинейную механическую характеристику, обычно аппроксимирующая линейная характеристика строится по двум точкам: пускового и номинального момента.
Поскольку неизвестны все функциональные зависимости ускорения, скорости и угла поворота от времени и нет возможности построить диаграмму нагрузки, то пригодность исполнительного двигателя можно проверить следующим упрощенным методом: если механическая характеристика выбранного двигателя охватывает точку (MHmax; Wmax) то двигатель пригоден. Wmax =(1.1-1.3) Wном

Рис.5 Апроксимированная механическая характеристика ИД
Как видно из рис.5, точка (Mэкв; WN) лежит внутри механической характеристики двигателя ЭМ-25
5. Выбор измерителя рассогласования.
Измерители рассогласования необходим для организации обратной связи в системе управления. Измеритель рассогласования это звено позволяющая неэлектрические параметры (ускорение, скорость, угол поворота) преобразовать в электрический сигнал.
Для систем с ограниченным углом поворота и работающей на переменном токе измеритель рассогласования строится на вращающихся трансформаторах, т.к. в системах работающих на переменном токе в качестве измерителей рассогласования преимущественного используются вращающиеся трансформаторы (ВТ). Принципиальная схема измерителя рассогласования реализована с помощью каскадной схемы на ВТ (Рис.6).
Рис.6 - Каскадная схема на ВТ
Выбор объекта управления: система с управляемыми аэродинамическим рулем.
Предварительно выберем ВТ. Технические данные вращающихся трансформаторов СКТ-225-2:
-
напряжение
питания: ![]()
-
частота
напряжения питания: ![]()
-
погрешность
отображения синусной зависимости: ![]()
-
асимметрия
нулевых точек: ![]()
-
остаточная
ЭДС в нулевых точках: ![]()
-
коэффициент
трансформации: ![]()
-
полное
входное сопротивление холостого хода: ![]()
-
момент
статического трения: ![]()
-
масса: ![]()
Ошибка измерителя рассогласования для данного объекта управления должна быть меньше допустимой ошибки:
![]()
Оценка воспроизводящегося измерителя рассогласования соответствует углу
поворота к сопоставленной оценке с допустимыми значениями ошибки. В том случае
если среднеквадратичная значение ошибки ИР не превышает 5% от общей погрешности
работы системы, то 
Ошибка измерителя рассогласования:
![]() , где
, где ![]() - допустимые ошибки
датчика и приемника соответственно;
- допустимые ошибки
датчика и приемника соответственно;
![]()
![]() - скоросная ошибка датчика и приемника соответственно:
- скоросная ошибка датчика и приемника соответственно:
 ,
,
где ![]() - допустимое
отклонение выходного напряжения от линейной зависимости.
- допустимое
отклонение выходного напряжения от линейной зависимости.
В качестве ИР выберем вращающиеся трансформаторы типа СКТ-225-2,
у которых ![]() . Находим допустимые ошибки и ошибку
ИР:
. Находим допустимые ошибки и ошибку
ИР:

![]()
![]()
Ошибка измерителя рассогласования меньше допустимой ошибки, определенной из данных технического задания, следовательно, выбранные вращающие трансформаторы подходят.
На рис.7 изображен эскиз конструкции вращающегося трансформатора типа СКТ-225-25.
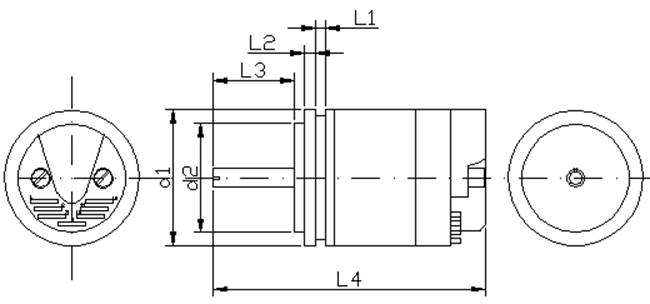
Рис.7 Эскиз конструкции вращающего трансформатора типа СКТ-225-25
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.