В ходе статического расчета определяется коэффициент передачи усилительно-преобразовательного устройства. Для систем управления рулями основным режимом является установка объекта управления в заданное положение, поэтому в расчетах используется значение статической ошибки и напряжения трогания.
Коэффициент усиления определяется по формуле:

где Uтр – напряжение трогания;
хст – статическая ошибка;
kир – коэффициент усиления измерителя рассогласования.
 В
В
 В
В
7. Анализ динамики
Целью динамического расчета системы управления является определение реакции системы на возмущения и определение степени ее устойчивости. В случае если система оказывается неустойчивой или параметры ее переходного процесса не удовлетворяют техническому заданию, то необходимо ввести корректирующее звено.
Общая структурная схема для системы управления рулями показана на рис.8.
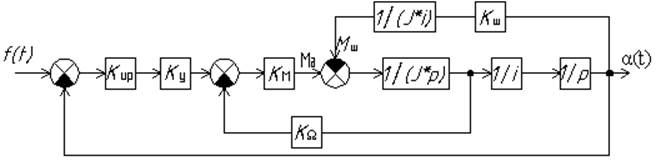
Рис.8 - Структурная схема управляемого руля
Км – коэффициент пропорциональности между напряжением и моментом:
Kш – коэффициент шарнирного момента;
КW – коэффициент пропорциональности между напряжением и скоростью:
 ;
;
a – угол поворота объекта управления;
![]() - коэффициент передачи ИР
- коэффициент передачи ИР
где
Uип - напряжение питания вращающегося трансформатора;
Kтд, Kтд - коэффициент трансформации ВТ приемника и датчика соответственно.
![]() –
момент инерции исполнительного двигателя и передаточного механизма,
приведенный к выходному валу:
–
момент инерции исполнительного двигателя и передаточного механизма,
приведенный к выходному валу:
 ;
;
Из структурной схемы, приведенной на рисунке 8, получается следующая передаточная функция для привода антенн:
 ,
,
 ,
,
 ,
,
 ,
,
Для построения переходного процесса на вход располагаемой передаточной функции подаем ступенчатый сигнал по амплитуде равный максимальному углу поворота. Реализация этого процесса смоделирована в программном продукте MathLAB.(Рис.9)

Рис.9 Структурная схема (MathLAB).
На рис.10 изображен график переходного процесса, полученного в программе MatLAB.
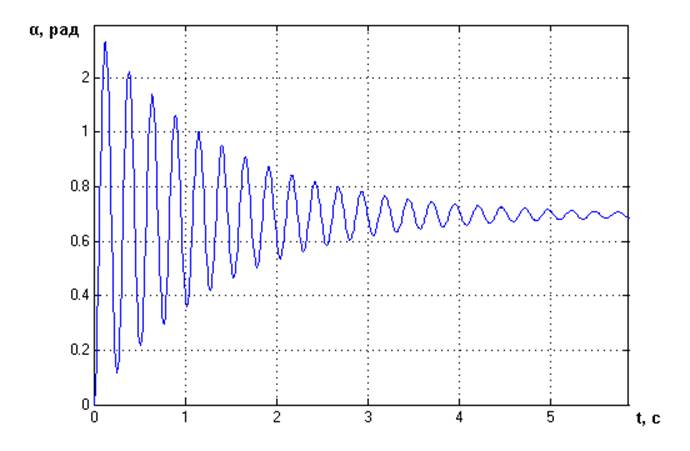
Рис.10 Переходной процесс располагаемой передаточной функции
Процесс является устойчивым. Время переходного процесса 6.5с.(т.е. когда кривая переходного процесса попадает в 5% коридор от установившегося значения).Величина перерегулирования 0.686.
В результате анализа динамических свойств, система построенная на выбранных элементах, приходим к заключению, что требуется выполнить коррекцию ее динамических свойств.
Для постройки корректирующего звена используется метод ЛАЧХ. Этот процесс включает следующие этапы:
1) Построение располагаемой ЛАХ;
2) Построение желаемой ЛАХ на основе требований предъявляемых к СУ;
3) Определение вида и параметров коррекции.
1) Для построения корректирующего звена необходимо найти корни передаточной функции располагаемой системы и представить ее в более удобном виде, при котором в знаменателе стоят элементарные сомножители.
 ,
,
Находим нули функции:
![]()
|
|
|
|
|
|
|
|
|
|
|
|
Запишем располагаемую передаточную функцию в удобном виде:
 .
.
![]() - постоянная времени
располагаемой функции.
- постоянная времени
располагаемой функции.
Располагаемая функция является колебательным звеном, поэтому в точке равной 1/T1 функция пойдет под наклоном -40 дб/дк.
Построим логарифмическую амплитудную характеристику (ЛАХ) (рисунок 11) и логарифмическую фазовую характеристику (ЛФХ) (рисунок 12) для нескорректированной системы.
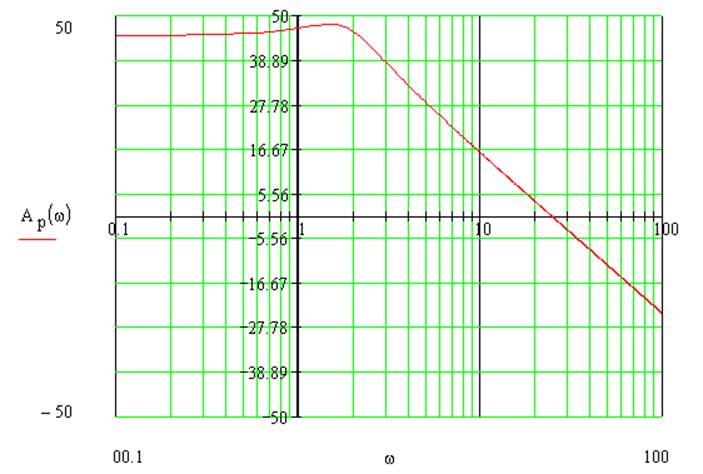
Рис.11 ЛАХ располагаемой функции
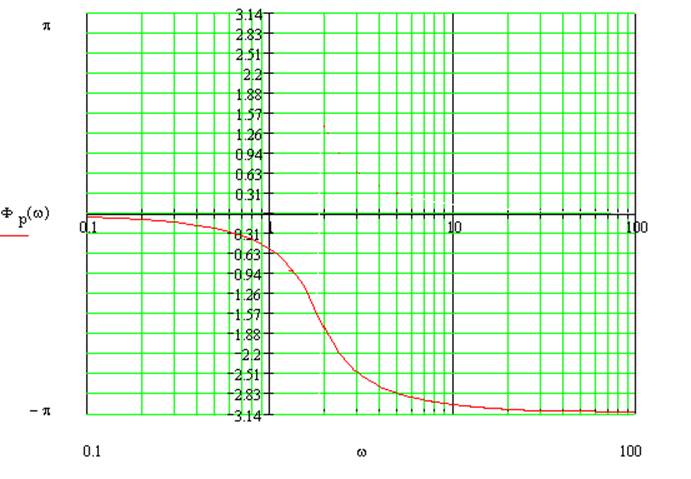
Рис.12 ФЧХ располагаемой функции
График ЛАХ располагаемой системы проходит через ось абсцисс раньше, чем ЛФХ достигает значения -180°.
2) Для обеспечения точности воспроизведения сигнала, заданной в техническом задании, необходимо построить запретную область в низкочастотной области, через которую не должна проходить желаемая ЛАХ.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.