Необходимое передаточное отношение редуктора вычисляется по формуле
|
|
(8.1.1) |
где Мдв – крутящий момент на валу двигателя;
Мкр – крутящий момент на выходном валу редуктора;
nдв – частота вращения двигателя;
nп – частота вращения панели.
Крутящий момент Мкр найдем по формуле
|
|
(8.1.2) |
где wn – угловая скорость вращения панели;
L – длина выходного вала;
m – погонная масса;
Е – модуль Юнга;
I – момент инерции сечения панели.
Принимая время раскрытия панели t, можно определить угловую скорость вращения панели
|
|
(8.1.3) |
где j - угол раскрытия панели.
Отсюда можно определить частоту вращения панели
|
|
(8.1.4) |
Погонную массу определим по формуле
|
|
(8.1.5) |
где М – масса выходного вала.
Определим момент инерции сечения панели
|
|
(8.1.6) |
где d – диаметр выходного вала.
Теперь можно определить крутящий момент на выходном валу Мкр.
Выберем двигатель и найдем
передаточное отношение редуктора U.
Величины  и
и ![]() должны
отличаться не более чем на 2,5%.
должны
отличаться не более чем на 2,5%.
Для более точного выбора двигателя необходимо учесть КПД редуктора hр и тогда выражение (8.1.1) будет иметь вид
|
|
(8.1.7) |
Для привода механизма раскрытия выберем двигатель постоянного тока ДПР-52 с частотой вращения nдв=6000 об/мин и напряжением питания 27 В.
Необходимое передаточное отношение редуктора
|
|
(8.1.8) |
где nп – частота вращения панели.
Примем время раскрытия панели tраскр=30 с, тогда угловая скорость раскрытия панели
|
|
(8.1.9) |
где j=90° - угол раскрытия панели.
Тогда
![]() .
.
Угловая скорость вращения панели
|
|
(8.1.10) |
отсюда
![]() , значит,
, значит,
![]() .
.
В качестве схемы редуктора механизма раскрытия выбираем схему семиступенчатого цилиндрического редуктора, которая изображена на рис. 8.1.
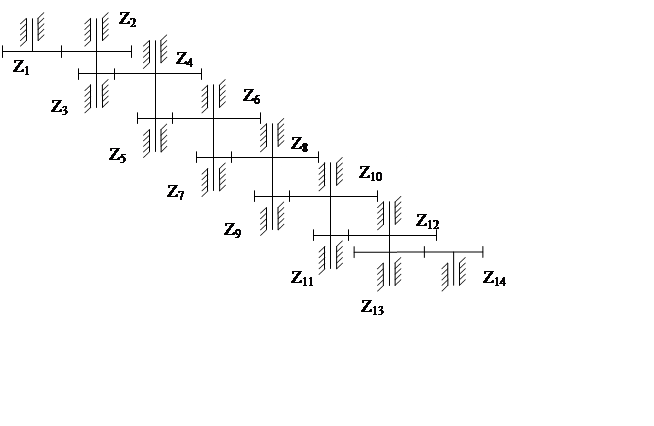 |
Назначим передаточное отношение для каждой ступени: U1,2=2,5; U3,4=3; U5,6=U7,8=U9,10=5; U11,12=3; U13,14=3,25.
Принимая числа зубьев для шестеренок каждой ступени, определим число зубьев для колес по формуле:
|
|
(8.1.11) |
где zi – число зубьев шестерни;
zi+1 - число зубьев колеса;
Ui,i+1 – передаточное отношение ступени:
шестерня: z1=40, колесо: z2=z1×U1,2=40×2,5=100;
шестерня: z3=30, колесо: z4=z3×U3,4=30×3=90;
шестерня: z5=20, колесо: z6=z5×U5,6=20×5=100;
шестерня: z7=20, колесо: z8=z7×U7,8=20×5=100;
шестерня: z9=20, колесо: z10=z9×U9,10=20×5=100;
шестерня: z11=40, колесо: z12=z11×U11,12=40×3=120;
шестерня: z13=40, колесо: z14=z13×U13,14=40×3,25=130.
Принимаем величину модуля зацепления m=0,3 мм, тогда диаметр колес
|
|
(8.1.12) |
где dw – диаметр делительных окружностей зубчатых колес.
Диаметры колес:
dw1=40×0,3=12 мм; dw2=100×0,3=30 мм;
dw3=30×0,3=9 мм; dw4=90×0,3=27 мм;
dw5=20×0,3=6 мм; dw6=100×0,3=30 мм;
dw7=20×0,3=6 мм; dw8=100×0,3=30 мм;
dw9=20×0,3=6 мм; dw10=100×0,3=30 мм;
dw11=40×0,3=12 мм; dw12=120×0,3=36 мм;
dw13=40×0,3=12 мм; dw14=130×0,3=39 мм.
Для того чтобы найти силы, которые будут раскрывать крыло БФ, необходимо провести кинематический анализ механизма раскрытия. Силами трения пренебрегаем для упрощения расчета.
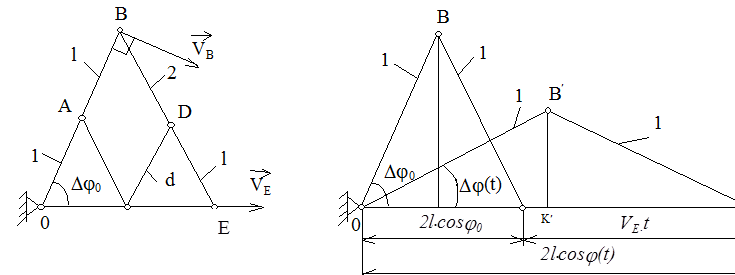
На рис. 8.2 изображена схема расчета половины крыла БФ. Пусть точка Е движется с постоянной скоростью (это условие обеспечивает механизм торможения).
Из DОВК (рис. 8.3) имеем
|
|
(8.1.13) |
Тогда
|
|
(8.1.14) |
За время t точка Е
переместится на расстояние ![]() (3). Тогда ее
расстояние от точки О будет равно 2l×cosj (из DОВ¢К¢).
(3). Тогда ее
расстояние от точки О будет равно 2l×cosj (из DОВ¢К¢).
|
Рис. 8.2 Схема расчета (начало) |
Рис. 8.3 Схема расчета (движение) |
Таким образом,
|
|
(8.1.15) |
|
отсюда |
|
|
|
(8.1.16) |
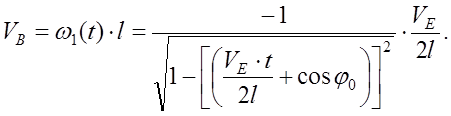
Находим угловую скорость звена 1:
|
|
(8.1.17) |
Находим угловое ускорение звена 1:
|
|
(8.1.18) |
Скорость точки В равна:
|
|
(8.1.19) |
По известным w1(t) и e1(t) можно вычислить центростремительное и тангенциальное ускорения точки В:
|
|
(8.1.20) |
|
|
(8.1.21) |
Полное ускорение точки В:
|
|
(8.1.22) |
Рассмотрим звено 2. Скорость точки D можно найти по теореме косинусов (рис. 8.3):
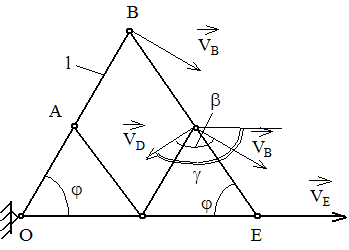
Рис. 8.4 Движение точки пантографа
|
|
(8.1.23) |
|
|
(8.1.24) |
|
|
(8.1.25) |
|
|
(8.1.26) |
Из рис. 8.4 видно, что:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.





 ,
,
 ,
, ,
,
 ,
, ,
,
 .
.