Эксплуатация первых двух советских орбитальных станций «Салют» в 1969 и 1970 гг. выявила недостаточную энерговооруженность станций, и поэтому в период с 1970 по 1972 г. во ВНИИЭМ по заказу НПО «Энергия» была разработана система ориентации панелей БФ, впервые установленная на станции «Салют-3» и с незначительными доработками – на всех последующих образцах станций, включая «Мир» и ее модули.
Главными особенностями системы ориентации БФ для орбитальных станций являются:
- обеспечение ориентации большого числа (до 16) панелей БФ в зависимости от комплектации системы;
- наличие в составе системы единой для всех приводов панелей датчиковой подсистемы измерения направления на Солнце в осях системы координат станции;
- наличие резервных (помимо оптических датчиков) трактов управления положения панелей станции;
- повышенная прочность приводов панелей БФ, рассчитанных как на устойчивость к одиночным ударным нагрузкам при стыковках со станцией модулей и транспортных кораблей, так и на усталостную устойчивость к многократным нагрузкам, обусловленным работой реактивных двигателей ориентации и перемещениями экипажа.
Каждый из приводов системы обеспечивает одноосную ориентацию панели СБ размером до 3,5´12 м. Конструкция блока привода схематично представлена на рис. 7.6.
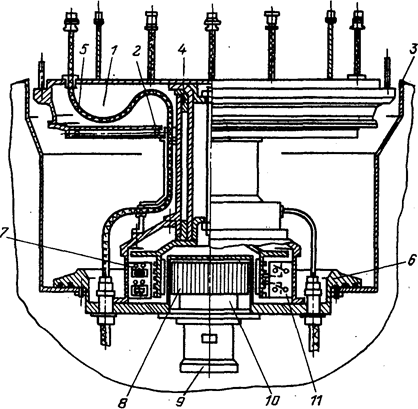
Рис. 7.6 Конструкция блока привода долговременной орбитальной станции (ДОС)
Быстроходная часть привода (электродвигатель 9, понижающий редуктор 10) находится в атмосфере гермоотсека станции 3 и отделена от остальной части привода гермоперегородкой 6. Передача вращения через гермоперегородку осуществляется с помощью магнитной муфты 8. Большой диаметр (65 мм) подшипников скольжения 4, изготовленных из металлокерамики с использованием дисульфида молибдена, и большая база (220 мм) между подшипниками выбраны исходя из действующих на привод нагрузок.
Для передачи электроэнергии от панели СБ используется комплект из десяти гибких кабелей 5, укладываемых в специальный кабельный барабан 1. Уложенный в виде многовитковой спирали радиочастотный кабель 2 служит для питания антенн, размещаемых на панели СБ.
Выходной вал привода снабжен такими датчиками угла поворота (положения): бесконтактным индукционным 7, используемым в тракте управления, и на базе микропереключателей для аварийной сигнализации и сигнализации на пульт экипажа.
Новым этапом в развитии системы ориентации БФ является разработка двухкоординатной системы, управляемой по сигналам управляющего информационно-вычислительного комплекса КА. Во многих случаях штатной эксплуатации слежение за Солнцем по двум координатам: азимуту и высоте относительно плоскости местного горизонта - значительно эффективнее, чем одноосная ориентация по азимуту.
Практическая реализация принципа двухкоординатного слежения целесообразна и оправдана при условии, если конструктивные и схемные решения при таком выборе приемлемы с точки зрения сложности конструкции, точности слежения и т.п.
Главной задачей при определении принципа управления двухкоординатной системой ориентации БФ являлось обеспечение возможности выбора различных законов движения выходного вала относительно каждой из двух осей поворота при разных орбитальных условиях.
Выбор типа электродвигателя блока привода СОСБ был во многом предопределен выработанным алгоритмом управления. Предпочтение было отдано шаговому электродвигателю. При его использовании удалось получить шаговое перемещение выходного вала СОСБ в пределах 4 - 6 при частоте шагов от 0 до 400 1/с. Это позволяет решить задачу слежения за Солнцем с высокой точностью при минимальных воздействиях на корпус КА.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.