В то же время на долговременных орбитальных станциях и транспортных КА, оснащенных СОСБ, к приводам СОСБ предъявляются требования по устойчивости к воздействию больших изгибающих моментов и осевых усилий.
Для прецизионных СОСБ существенным фактором является выбор скорости слежения за Солнцем, близкой к скорости изменения азимута Солнца на рабочих участках орбиты, обеспечивающей минимальную величину ускорений при троганиях и остановках БФ. Однако это автоматически влечет за собой необходимость более высокой скорости наведения БФ на Солнце и обнуления СБ при переводе КА в режим постоянной солнечной ориентации.
Для СОСБ больших КА вполне допустимо дискретное движение БФ со скоростями, превышающими скорость изменения азимута Солнца, что позволяет для всех маневров использовать только одну скорость.
Согласно функциональной схеме автономной СОСБ, приведенной на рис. 7.2, наиболее простым способом динамического уравновешивания вращающихся СБ является установка компенсирующего маховика (КМ), кинетический момент которого равен и противоположен по знаку кинетическому моменту СБ:
|
|
(7.2.3) |
где ![]() — момент инерции компенсирующего
маховика и угловое ускорение его вращения.
— момент инерции компенсирующего
маховика и угловое ускорение его вращения.
Соотношение (7.2.3) можно выполнить тремя способами:
1) на валу приводного двигателя СБ установить компенсирующий маховик, момент инерции которого должен быть выбран из условия
|
|
(7.2.4) |
где i — передаточное число редуктора Р привода СБ;
2) на КА установить автономный маховик и связать его электрическим валом с приводом СБ;
3) использовать исполнительные электромеханические органы системы ориентации корпуса КА, изменяя их кинетический момент по сигналу скорости вращения СБ.
Первый способ является наиболее простым и надежным. Для того чтобы масса компенсирующего маховика была минимальной, следует применять двигатель по возможности высокоскоростной и редуктор с большим передаточным числом. Так, в случае необходимости обеспечения скорости слежения за Солнцем порядка 0,02 °/с, скорости наведения и обнуления СБ порядка 0,3 °/с и использования двигателя с максимальной частотой вращения 4000 об/мин передаточное число редуктора должно быть порядка i=80000. В таком редукторе в качестве выходного звена удобно использовать герметичную волновую передачу, позволяющую, с одной стороны, обеспечить передаточное число порядка i=100, а с другой - загерметизировать полость двигателя и быстроходных передач и позволить работать им в нормальных условиях окружающей среды.
В рассматриваемой СОСБ блок ДС устанавливается на СБ таким образом, чтобы оптическая ось ДС была параллельна нормали к поверхности СБ. ДС имеет три поля обзора. Поля обзора ДС выбираются таким образом, чтобы при всех годовых изменениях высоты Солнца и при всех динамических ошибках слежения СОСБ за азимутом Солнца последнее не выходило из полей обзора ДС.
Каждое из полей обзора ДС формируется с помощью сигналов фотодиодов, «видимость» Солнца у которых ограничена шторками. Поля обзора по их функциональному назначению обозначаются Н — «назад», Д — «вперед» и ЗН — «зона нечувствительности».
При угле азимута Солнца относительно корпуса А
и угле поворота СБ относительно корпуса КА ![]() Солнце
попадает в одно или два поля обзора ДС в зависимости от угла ошибки СОСБ
Солнце
попадает в одно или два поля обзора ДС в зависимости от угла ошибки СОСБ ![]() (рис. 7.3).
(рис. 7.3).
Обычно по первичным сигналам Н, В, ЗН блок управления СОСБ формирует выходную характеристику ДС с малым гистерезисом и большой ЗН, как это показано на рис. 7.3.
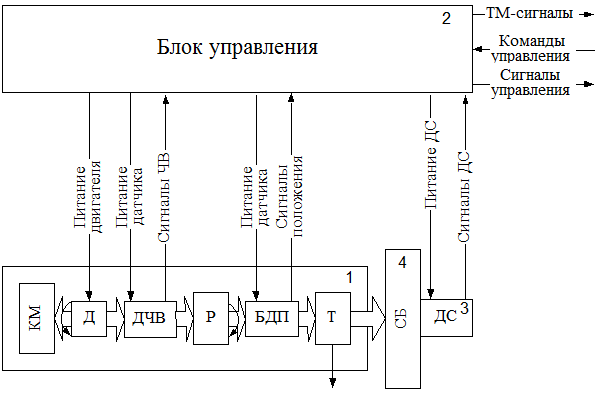
Рис. 7.2 Функциональная схема автономной СОСБ:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.