БУ — блок управления; КМ — компенсирующий маховик; ДЧВ — датчик частоты вращения; Р — редуктор; БДП — блок датчиков положения; Т — токосъемник; ДС—датчик Солнца
При нахождении Солнца в поле ЗН сигнал на
движение привода БФ отсутствует, а при достижении значения угла ![]() " формируется сигнал на движение
привода СБ «вперед». Так как установившаяся скорость привода несколько выше
скорости изменения угла
" формируется сигнал на движение
привода СБ «вперед». Так как установившаяся скорость привода несколько выше
скорости изменения угла ![]() , то через некоторое
время значение угла
, то через некоторое
время значение угла ![]() начинает уменьшаться, и при
начинает уменьшаться, и при ![]() ' выключается двигатель. Такие циклы на
рабочем участке повторяются многократно. Аналогично формируется и сигнал на
движение привода СБ «назад» при отрицательных значениях угла.
' выключается двигатель. Такие циклы на
рабочем участке повторяются многократно. Аналогично формируется и сигнал на
движение привода СБ «назад» при отрицательных значениях угла.
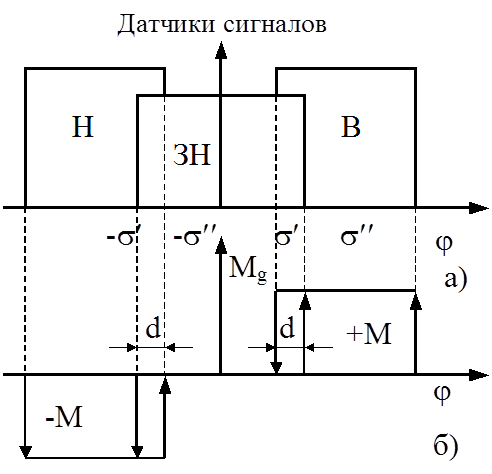
Рис. 7.3 Схема полей обзора ДС по азимуту и условия формирования сигнала М на включение двигателей
Привод СБ, как всякий редуктор, имеет люфт, который обусловлен зазорами и упругими деформациями в передаче. Для уменьшения удара в момент трогания СБ в приводе предусматривается выборка люфта на малой скорости, примерно в 10 раз меньшей скорости слежения за Солнцем.
Проведенные аналитические исследования влияния конструктивных параметров СОСБ на динамику движения КА и исследования с помощью метода структурного математического моделирования позволили установить основные параметры привода БФ, влияющие на динамику привода. К ним относятся:
- ускорение приводного двигателя при разгоне и торможении e;
- жесткость передачи Сn;
- кинематическая погрешность передачи x;
- момент трения Мтр и его стабильность;
- люфт передачи D;
- точность компенсации момента инерции БФ (точность подбора момента инерции маховика).
Выполненные исследования позволяют дать следующие рекомендации разработчикам КА и СОСБ:
1) КА желательно компоновать так, чтобы момент инерции корпуса КА относительно оси вращения СБ был наибольшим, а момент инерции СБ относительно собственной оси вращения — наименьшим.
2) Жесткость кинематической цепи привода Сn, приведенная к выходному валу, должна быть по возможности большей. Она в основном определяется жесткостью выходной ступени редуктора.
3) Пусковой момент М приводного двигателя является основным конструктивным параметром, определяющим ускорение e привода в системах управления с нерегулируемым моментом:
|
|
(7.2.5) |
Верхняя граница ускорения emax определяется допустимой величиной скорости возмущенного движения корпуса КА, а нижняя граница emin — допустимой максимальной погрешностью точности слежения за Солнцем.
Статический момент трения привода Мст, приведенный к валу двигателя, может меняться в широких пределах от 0 до Мст. Поэтому пусковой момент двигателя и передаточное число редуктора должны выбираться из условий
|
|
(7.2.6) |
Если это соотношение выполнять трудно, то следует в приводах БФ применять систему управления, обеспечивающую заданную величину ускорения e при пуске и остановке привода.
4) Скорость выборки
люфта передачи, а также разность моментов трений покоя и движения Mтр - Mтд
влияют на угловую скорость возмущенного движения корпуса КА. Снижение этой
скорости приводит к уменьшению возмущений, но при этом увеличивается время
выборки люфта передачи и, следовательно, ухудшается средняя точность ориентации
СБ. Люфт редуктора ![]() состоит из люфта
состоит из люфта ![]() , обусловленного
зазорами, и люфта
, обусловленного
зазорами, и люфта ![]() , вызванного упругими
деформациями звеньев передачи. Как известно, люфт
, вызванного упругими
деформациями звеньев передачи. Как известно, люфт ![]() передачи, состоящей из n звеньев, каждое из которых
имеет зазор
передачи, состоящей из n звеньев, каждое из которых
имеет зазор ![]() , определяется выражением
, определяется выражением
|
|
(7.2.7) |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.
 ×
×