w3 – переменная частота вращения исполнительного двигателя;
w20 – переменная частота вращения основного мощного двигателя;
2.1. Уравнение объекта.
Объект управления образуют в совокупности следующие элементы: бак-мерсеризатор, бачок-дозатор, насос, привод насоса, транспортер-питатель и основной двигатель.
Состояние объекта характеризуется следующими параметрами:
ω1(t) = x(t) – частота вращения привода насоса подачи пульпы;
ω20 – частота вращения основного мощного двигателя;
ω2 (t) – частота вращения на выходе дифференциала;
ρ – плотность сухой целлюлозы, кг/м³;
y(t) – концентрация пульпы в баке-мерсеризаторе, кг/м³;
V– объем смеси в баке-мерсеризаторе, м³.
Введем предположение о том, что внутри бака-мерсеризатора имеет место идеальное перемешивание.
Получим уравнение объекта, связывающее регулируемую величину (концентрацию целлюлозы в баке), возмущающее воздействие (изменение частоты вращения привода насоса) и регулирующее воздействие (изменение частоты вращения исполнительного двигателя).
Аналитическое уравнение объекта будем получать, руководствуясь следующими двумя принципами:
1) Принцип бесконечно-малых величин;
2) Принцип материального баланса.
Рассмотрим малый интервал времени dt. За это время концентрация целлюлозы изменится на величину dy.
Запишем уравнение материального баланса, т.е. выразим приращение количества (массы) целлюлозы в баке за время dt (равное Vdt) через разность входящего и выходящего потоков:
![]()
где a1, a2 – коэффициенты пропорциональности, отражающие конструктивные особенности элементов объекта и имеющие смысл объемов (м³).
Разделим полученное уравнение на Vdt:
Для того чтобы полученное дифференциальное уравнение включало регулирующее воздействие [ω3(t)] в явном виде, проведем преобразование, используя следующую формулу:
ω2(t) = ω20(t) + ω3(t);
Тогда получим:
 (2.1)
(2.1)
Последнее дифференциальное уравнение и является уравнением объекта. Как видно, оно нелинейное, с нелинейностью типа произведения.
2.2. Уравнение датчика.
Конструктивно датчик концентрации представляет собой лопастную мешалку.
Принцип действия датчика состоит в следующем. Мешалка, вращаясь, испытывает некоторое сопротивление со стороны пульпы. Это сопротивление зависит от вязкости, которая, в свою очередь, является функцией концентрации целлюлозы. Измеренное таким образом значение концентрации преобразуется в электрический сигнал – напряжение.
Характеристика датчика изображена на рис. 2.
![]()
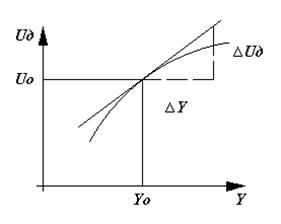
Рис.2. Характеристика датчика.
Сделаем некоторые предположения относительно свойств датчика:
1. Инерционность датчика – мала (равна нулю).
2. Зависимость выходного напряжения от концентрации – линейна.
Исходя из этого, запишем уравнение датчика:
Uд(t) = Kд[y(t)–y0] + U0; (2.2)
где Uд(t) – напряжение на выходе с датчика [В];
U0– напряжение при номинальной (заданной) концентрации [В];
y0 – номинальная концентрация [кг/м³];
y(t) – текущая концентрация [кг/м³];
Kд– коэффициент пропорциональности (передачи) [В-м³/кг];
Полученное уравнение можно преобразовать к равносильной форме, записанной в отклонениях:
Uд(t)– U0 = Kд[y(t)–y0]; (2.3)
Как уже было сказано, регулятор реализует пропорциональный закон регулирования, формируя управляющий сигнал (напряжение) пропорционально ошибке регулирования, равной разности текущего и требуемого значения концентрации (либо соответствующих значений напряжения).
Запишем уравнение регулятора:
Uр = – Kр(Uд – U0); (2.4)
где Kр – коэффициент передачи регулятора.
2.4. Уравнение исполнительного механизма.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.