|
Пределы допускаемой основной погрешности |
Обозначения |
Форма выражения погрешности |
|
|
в документации |
на приборе |
||
|
γ = ± 1,5 |
Класс точности 1,5 |
1,5 |
Приведенная погрешность |
|
δ = ± 0,5 |
Класс точности 0,5 |
0,5 |
Относительная погрешность, постоянная |
|
δ = ± [ 0,02 + 0,01( xk/x –1)] |
Класс точности 0,02/0,01 |
0,02/0,01 |
Относительная погрешность, возрастает с уменьшением х |
18. Виброакустические измерения. Общие положения.
 Спектр
случайного колебания
Спектр
случайного колебания
Уровень звукового давления.
где р – среднеквадратическое значение звукового давления;
р0 – среднеквадратическое значение опорного звукового давления.
Характеристикой интенсивности звука является громкость.Громкость измеряется в сонах. 1 сон - громкость тона 1 кГц при уровне 40 дБ. Звук, имеющий 2, 3,..сона,
Типичным слушателем воспринимается как вдвое, втрое,.. громкий звук, чем в 1сон
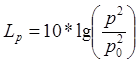
Вторая характеристика учитывает уровень звукового давления и частоту звука.
Уровень громкости - это уровень тона частотой 1 кГц, субъективно равного по громкости оцениваемому сигналу. Единица измерения – фон.
Кривые равной громкости
19. Аппаратура для измерения вибрации и шумов.
Средства измерения вибрации и шумов.
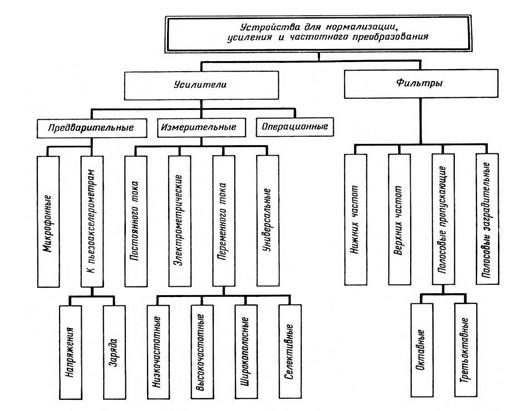
В системах измерения шума и вибраций принято использовать так называемые октавные и третьоктавные фильтры
Полоса пропускания В таких фильтров определяется
из условия:
![]() где f1 и f2 – нижняя и
верхняя границы полосы пропускания,
где f1 и f2 – нижняя и
верхняя границы полосы пропускания,
а = 1 для октавных фильтров и а = 1/3 для третьоктавных
Центральная частота для полосовых фильтров определяется соотношением:
![]()
|
Центральные частоты f0 октавных фильтров, Гц |
16; 31,5; 63; 125; 250; 500; 1000; 2000; 4000; 8000; 16000 |
|
Центральные частоты f0 третьоктавных фильтров, Гц |
16; 20; 25; 31,5; 40; 50; 63; 80; 100; 125; 160; 200; 250; 315; 400; 500; 630; 800; 1000; 1250; 1600; 2000; 2500; 3150; 4000; 5000; 6300; 8000; 10000; 12500; 16000; 20000 |
20. Пьезоэлестрические и тензорезистивные акселерометры для измерения виброускорений.
Пардон, по этому вопросу ничего дельного не нашёл.
21. Индукционные и индуктивные преобразователи для измерения виброскоростей.
Индукционные преобразователи
Индукционные преобразователи вибрации (как и пьезоэлектрические) относятся к датчикам генераторного типа. Принцип действия индукционных преобразователей основан на явлении электромагнитной индукции, т.е. на возникновении электродвижущей силы (ЭДС) в электрической катушке при изменении магнитного поля. Таким образом, в них измеряется виброскорость, так как именно она вызывает изменение магнитного поля в датчике. Поэтому чувствительность таких датчиков характеризуется величиной напряжение/виброскорости, (В/м/с).
К достоинствам индукционных преобразователей можно отнести простоту конструкции и надежность в эксплуатации. Основной их недостаток связан с принципом действия, практически ограничивающим нижний диапазон измеряемых частот пределом 8 – 10 Гц. Кроме того, индукционные преобразователи имеют значительно бóльшую массу, чем пьезоэлектрические, что снижает максимальное значение измеряемых частот до 500 – 1500 Гц.
Конструктивно индукционный преобразователь состоит из корпуса, сейсмической массы на маятниковой или осевой подвеске и индукционного элемента. При колебаниях сейсмической массы происходит относительное перемещение катушки и постоянного магнита специальной формы, в результате чего в катушке наводится ЭДС. Для повышения чувствительности преобразователя увеличивают число витков катушки. Но увеличение числа витков приводит к повышению реактивного сопротивления катушки и увеличению массы преобразователя, а следовательно, к уменьшению частотного диапазона измерения со стороны высоких частот.
Многие из существующих индукционных преобразователей обладают чувствительностью, достаточной для регистрации измерительного электрического сигнала без дополнительного усиления. Характеристики некоторых отечественных индукционных преобразователей приведены в таблице 4.7.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.