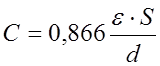
Одним из наиболее распространенных классов параметрических преобразователей параметров вибрации являются емкостные измерительные преобразователи. Они состоят из подвижной и неподвижной частей, относительное перемещение которых приводит к изменению емкости преобразователя:
 [пФ], 4.6
[пФ], 4.6
где ε – диэлектрическая проницаемость среды;
S – площадь перекрытия плоскопараллельных пластин преобразователя;
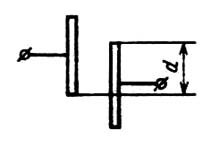
d – расстояние между пластинами.
Изменение емкости преобразователя происходит при изменении любого параметра, входящего в формулу (4.6), поэтому выделяют три основные конструкции емкостных датчиков вибрации, которые представлены в таблице 4.9.
Таблица 4.9
|
Тип конструкции |
Схема конструкции |
Закон изменения емкости |
|
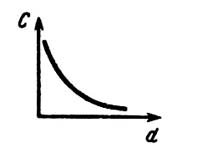
С переменным расстоянием между пластинами |
|
|
|
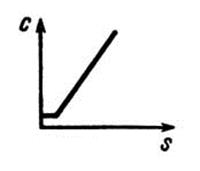
С переменной площадью перекрытия пластин |
|
|
|
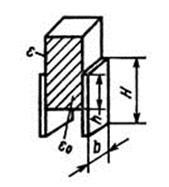
С переменной диэлектрической проницаемостью среды |
|
|
Одной из основных задач, решаемых при создании емкостных преобразователей, является увеличение их емкости. Поскольку в большинстве случаев увеличение площади пластин ограничено допустимыми габаритами, то эта задача обычно решается уменьшением зазора. В этом случае к качеству материалов и защищенности зазора от влаги и пыли определяются особо жесткие требования. Технические характеристики некоторых емкостных преобразователей приводятся в таблице 4.10.
Табл. 4.10
|
Тип |
Назначение |
Диапазон измеряемых перемещений, мм |
Частотный диапазон, кГц |
|
ММ0004 «Брюль и Къер» |
Измерение виброперемещений |
10% от расстояния до вибрирующей поверхности |
0,2 – 200 |
|
51Д05 |
Контактный датчик смещения |
0 – 10 0 – 70 |
0 – 100 |
|
51Д11 51Д21 |
Бесконтактный датчик вибрации |
0,1 – 1000 мкм |
0 – 1000 |
|
51Д07 |
Сейсмический датчик крутильных колебаний |
±2 ±5 |
0,018 – 1,5 |
Тензорезисторные преобразователи
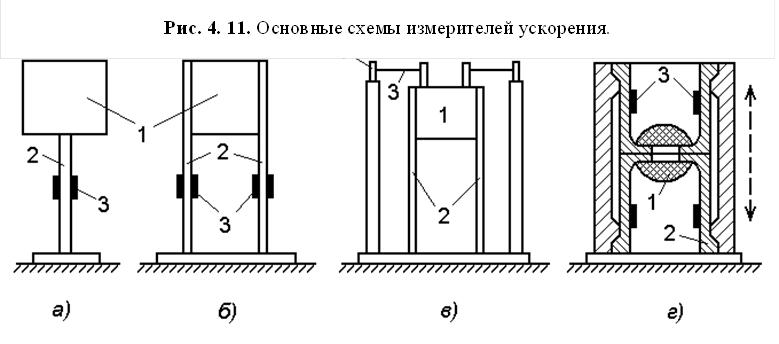 |
Основные схемы измерителей ускорения приведены на рисунке 4.11. Измеритель, показанный на рисунке 4.11 а, прост по конструкции и состоит из основания и чувствительного элемента 2, выполненного в виде консольной балки с наклеенными на нее тензорезисторами 3. На конце балки укреплена сейсмическая масса 1.
На рисунке 4.11 б показан измеритель, чувствительный элемент которого представляет собой пару параллельных консольных балок 2 с тензорезисторами 3, на которых закреплена инерционная масса 1. Такая конструкция обеспечивает параллельность перемещения инерционной массы.
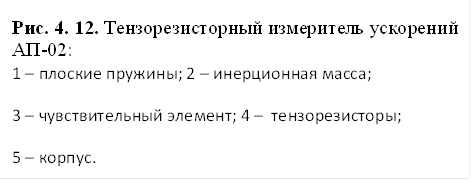
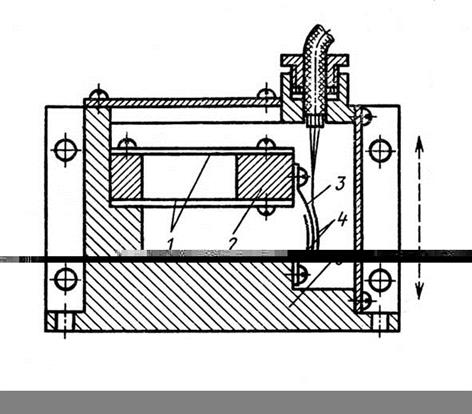
В измерительном преобразователе АП-2 (рис. 4.12) эта схема несколько модифицирована – инерционная масса крепится к корпусу парой плоских пружин, а тензорезисторы размещены на дополнительном чувствительном элементе.
Тензорезисторный измеритель ускорений типа МП-02 построен по схеме, показанной на рис. 4.11 в. Для определения перемещений сейсмической массы 1, крепящейся к корпусу посредством двух плоских пружин 2, служат подвесные (безосновные) тензорезисторные решетки 3. Для исключения деформации опор-ных штифтов 4 их выполняют из рубина.
Преобразователи МП-02 выпускают в двух модификациях – для измерения ускорений ±60 м/с2 в частотном диапазоне до 10 Гц и ускорений ±150 м/с2 в частотном диапазоне до 20 Гц.
Конструкция показанная на рисунке 4.11 г реализуется в измерителях больших ускорений. Чувствительный элемент представляет собой пару цилиндрических стаканов 2, с наклеенными вдоль продольной оси тензорезисторами 3. Роль инерционной массы выполняют соединенные днища стаканов и масса 1, закрепленная на них.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.