При наложении большого числа подобных пластин можно получить пакеты, позволяющие измерять силы до 50 МН, поэтому магнитоупругие динамометры обычно используются в тяжелой промышленности (особенно в прокатных цехах) для грубых квазистатических измерений больших сил. Особое преимущество магнитоупругих динамометров сотоит в большом (до 10 В) выходном сигнале и отсутствии необходимости применять усилители. Класс точности магнитоупругих динамометров – от 0,1 до 2 %.
16.Средства измерения крутящих моментов
Среди электрических устройств, предназначенных для измерения крутящих моментов, наибольшее распространение получили различные торсионные датчики, в которых происходит измерение деформации скручивающегося упругого элемента (торсионного вала).
В качестве измерительных преобразователей величины деформации торсионного вала используют тензорезисторные мосты. При этом возникает определенная сложность с подачей напряжения питания к подобным преобразователям в случае их расположения на вращающемся валу, что характерно для определения крутящего момента двигателя. С аналогичной проблемой приходится сталкиваться и при снятии с преобразователя измерительного сигнала.
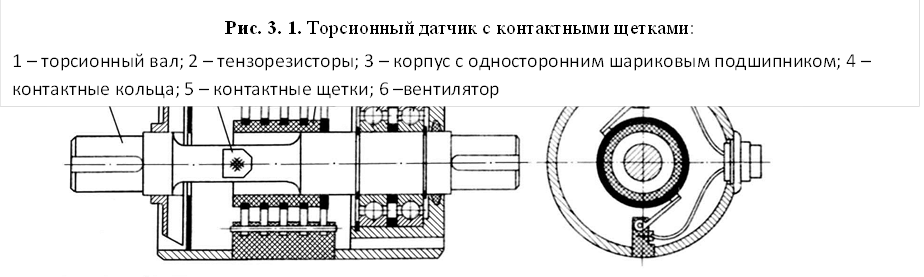
Одним из вариантов решения этой задачи является применение контактных щеток (рис. 3.8). Но щетки, которые обычно выполняются из графита, подвергаются износу, затрудняет применение подобной конструкции для осуществления постоянного определения крутящего момента в процессе эксплуатации механизма (станка или др.).
В качестве альтернативы может применяться бесконтактный торсионный датчик [6], схема которого показана на рисунке 3.9. Стационарный генератор b2 переменного напряжения частотой 15 кГц, питающийся от аккумулятора b1 или от сети, вырабатывает напряжение, которое посредством индуктивной передачи b3 поступает на вращающуюся часть датчика. Непосредственно на вращающейся части закреплен блок b4, преобразующий переменное входное напряжение в стабилизированное постоянное напряжения питания тензорезисторного моста a.
Выходной сигнал мостовой схемы через преобразователь напряжение-частота с1 поступает на металлические кольца, которые в паре с внешними пластинами образуют емкостную связь с2, обеспечивающую передачу измерительного сигнала в стационарную часть прибора. Прошедший усилитель с3 сигнал поступает в блок индикации момента e1. Кроме того этот сигнал может быть использован для определения мощности, для чего он перемножается с сигналом скорости вращения, поступающего из устройства измерения частоты вращения. Данное устройство, как правило, состоит из датчика импульсов d1, приемника импульсов d2и усилителя d3. Для отображения значений скорости вращения и мощности на валу предусмотрены соответствующие индикаторные устройства e2 и e3
17. Классы точности средств измерений ( нормирование погрешностей средств измерений, классы точности измерительных приборов).
1) Нормирование погрешностей СИ.
∆ = ± а для аддитивной погрешности
Для мультипликативной погрешности они устанавливаются в виде линейной зависимости ∆ = ± (а + bх), где х – показание измерительного прибора, а и b – положительные числа, не зависящие от х.
Предел допускаемой относительной погрешности (в относительных единицах) для мультипликативной погрешности устанавливают по формуле δ = ∆ / х = ± c. Для аддитивной погрешности формула имеет вид: δ = ∆ / х = ± [ c + d ( xk / x – 1)] где xk — конечное значение диапазона измерений прибора; c и d - относительные величины.
Первое слагаемое в этой формуле имеет смысл относительной погрешности при х = хk , второе — характеризует рост относительной погрешности при уменьшении показаний прибора. Пределы допускаемой приведенной погрешности (в процентах) следует устанавливать по формуле γ = 100∆ / xN = ± р
2)Классы точности измерительных приборов.
Обозначение классов точности
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.