Идеальный смеситель осуществляет перемножение принимаемого и излучаемого сигнала с образованием сигналов на суммарной и разностной частоте:
 5.3
5.3
В результате выделяется сигнал с доплеровской частотой. Посредством фильтрации (ФНЧ) выделяется низкочастотная (допплеровская) часть сигнала. После этого сигнал с частотой Доплера автоматически обрабатывается с целью получения значения скорости снаряда или регистрируется для последующего анализа.
Станция АБС – 1М использует принцип супергетеродинного приема, который позволяет уменьшить частоту принятого сигнала, что позволяет эффективно обрабатывать его. Для этого вводится генератор-гетеродин с частотой fg , после чего этот сигнал смешивается с принимаемым на нелинейном (квадратичном) элементе. Как результат, приходим к формулам:
[A1 cos(2πfg t) + A2 cos(2π(f0 – fД)t)]^2 = [A1 cos(2πfg t)]^2 +
+[A2 cos(2π(f0 – fД)t)]^2 + 2A1 A2 cos(2πfg t) cos(2π(f0 – fД)t)
Последний член позволяет выделить составляющие с низкой промежуточной частотой fпч = f0 - fg :
cos(2πfgt) cos(2π(f0 – fД)t) = cos(2p(fg +f0 –fД))+cos(2p(fпч –fД))
Выводы для супергетеродинного приема:
• Слабый сигнал усиливается посредством гетеродина.
• Выделяется сигнал с разностной частотой ( fпч –fД ).
Одним из наиболее распространенных доплеровских измерителей начальной скорости является артиллерийская баллистическая станция АБС-1М, которая измеряет время пролета снарядом двух измерительных баз длиной 2 метра. По этим двум отсчетам с помощью таблиц находится скорость, приведенную к дульному срезу (описание АБС-1М дано в приложении 1).
26. Моноимпульсный радиолокационный метод.
Среди аппаратуры для измерения параметров траектории пуль, снарядов, мин и ракет наибольшее распространены системы, работающие в оптическом и радио диапазонах. Радиолокационные комплексы позволяют непосредственно измерять угловые координаты и дальность до объекта, а оптические (за исключением квантовых дальномеров) измеряют угловые координаты объекта с нескольких точек, что позволяет путем расчетов определять декартовы координаты цели.
В радиолокационных станциях (РЛС), применяемых при траекторных измерениях обычно используется импульсный метод измерения дальности, заключающийся в измерении интервала времени между излучением радиоимпульса в сторону объекта (снаряда, ракеты и т.п.) и приходом отраженного сигнала. Дальность Д в этом случае определяется из уравнения:
 , 5.5
, 5.5
где Dt – время распространения сигнала до цели о обратно;
с = 3×108 м/с – скорость света.
Для измерения угловых координат обычно используются датчики углового положения антенной системы, ось которой постоянно направлена на летящий снаряд, что достигается применением системы автоматического сопровождения по угловым координатам.
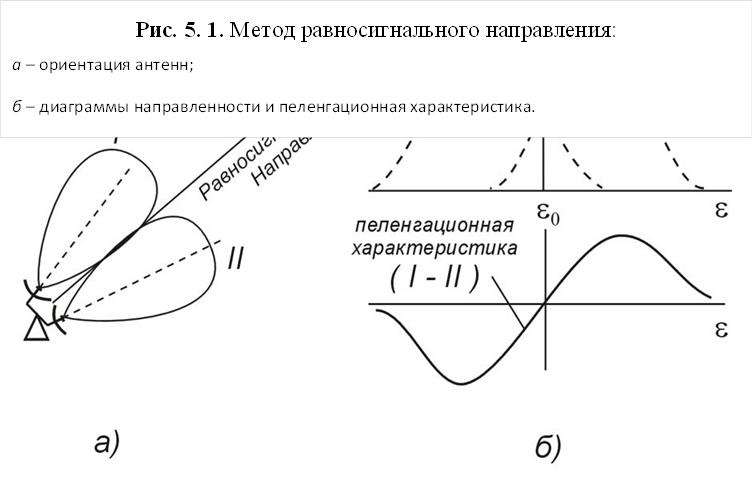
В своей работе системы автоматического сопровождения обычно используют метод равносигнального направления. Сущность данного метода для определения угла места поясняется рисунком 5.11.
Пусть РЛС имеет две направленные антенны (рис. 5.11 а), оси которых в вертикальной плоскости образуют некоторый угол. Амплитуда сигнала снимаемого с каждой из антенн будет зависеть от углового положения объекто относительно электрической оси соответствующей антенны. Данная зависимость носит название диаграммы направленности антенны (на рисунке 5.11 б показаны диаграммы направленности антенн I и II). Если отраженный сигнал приходит с некоторого направления e0 , соответствующего точке пересечения диаграмм направленности, то амплитуды выходных сигналов обеих антенн будут одинаковыми, поэтому данное направление называется равносигнальным.
 |
По способу реализации метода равносигнального направления выделяют моноимпульсные РЛС и РЛС со сканированием диаграммы направленности. В первом случае радиолокационная станция имеет четыре антенных системы (по две для вертикальной и горизонтальной плоскостей) подключенных к мостовой суммарно-разностной системе (рис. 5.12) и три приемных тракта, построенных по супергетеродинной схеме.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.