Структурная схема типичной моноимпульсной РЛС сопровождения в случае моноимпульсной РЛС показана на рисунке 5.13 .
 |
![]() , 5.6
, 5.6
где f0 – частота отраженного сигнала;
fгет – частота гетеродина.
Суммарный сигнал усиливается на промежуточной частоте, детектируется и поступает в систему сопровождения по дальности, которая не только определяет текущее значение дальности, но и обеспечивает синхронизацию работы приемника и передатчика. Постоянство крутизны пеленгационной характеристики поддерживается системой автоматической регулировки усиленя (АРУ).
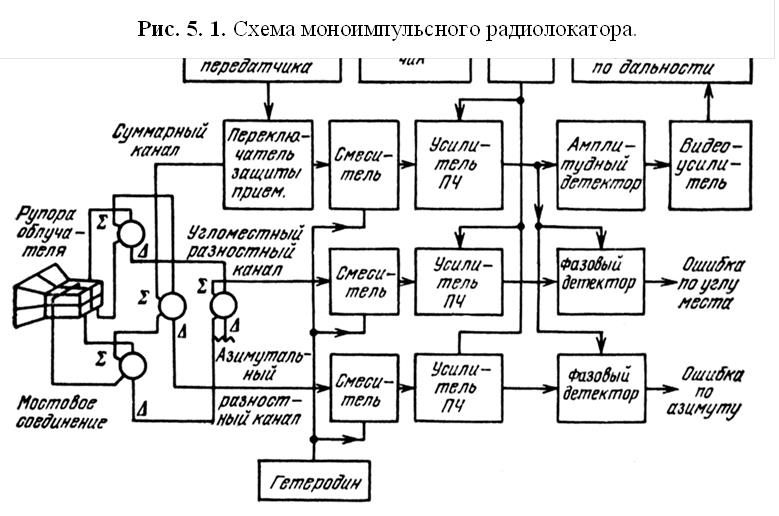 |
Суммарный сигнал также используется в качестве опорного напряжения в фазовых детекторах азимутального и угломестного приемных трактов. Фазовый детектор является устройством, выполняющим скалярное умножение, выходное напряжение которого равно:
![]() , 5.7
, 5.7
где Асум – амплитуда суммрного сигнала;
Аразн – амплитуда разностного сигнала;
θ – фазовый угол между суммарным и разностным сигналами.
Фазовый угол принимает значения 00 или 1800 в зависимости от направления отклонения цели от равносигнального направления в соответствующей плоскости, что будет соответствовать положительному или отрицательному значению сигнала ошибки по угловой координате, снимаемому с выхода фазового детектора. Сигналы ошибки управляют работой приводов наведения антенной системы, обеспечивающих постоянное слежение за движущимися объектами.
Точность определения угловых координат движущихся объектов определяется крутизной пеленгационной характеристики, зависящей от ширины луча диаграммы направленности антенной системы – чем уже луч, тем выше точность измерения угловых координат. Для получения узких лучей, требуется увеличивать габариты антенных систем, что затрудняет слежение за быстро перемещающимися объектами, или переходить к использованию локационной аппаратуры, работающей в диапазоне более коротких волн. Этим обуславливается создание телевизионных устройств определения координат движущихся объектов, в которых роль антенн выполняют системы оптических линз, сочетающие малые габариты с узкой направленностью.
Как правило, подобные системы измеряют только угловые координаты, поэтому для определения дальности до объекта используется измерение угловых координат с нескольких точек. При этом по принципу действия можно выделить следящие телевизионные устройства и устройства с фиксированной ориентацией.
В системах с телевизионными датчиками, имеющими фиксированную ориентацию (примером может служить аппаратура БАМ-А Нижнетагильского СКБ измерительной аппаратуры), снимается изображение определенной области пространства, после чего производится обработка полученных изображений. По результатам обработки определяются отклонения объекта от центра изображения (оптической оси) для каждого телевизионного устройства, которые в сумме с известными углами ориентации телевизионных датчиков дают угловые координаты объекта. В качестве источников изображения можно использовать и результаты синхронной фотосъемки. Недостатком таких систем является их приспособленность к определению координат только на участке траектории, укладывающимся в пределы кадра. Так размеры плоскости в которой аппаратура БАМ-А позволят измерять координаты и скорости зависит от расстояния до базы твердотельных телевизионных датчиков «Сапфир» и для расстояния 500 метров составляет 10 х 10 метров.
В следящих телевизионных устройствах используют передающие телевизионные трубки в которых предусмотрено сканирование поверхности фотокатода по определенному закону. Примером подобной телевизионной трубки может служить диссектор, устройство которого показано на рисунке 5.19.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.