
СПбГУАП
Рейтинг за работу
Преподаватель Филатов Ю.В.
Отчет
о лабораторной работе
проделанной в учебном центре ЦНИИ «Электроприбор»
«Компьютерное моделирование системы стабилизации периметра
лазерного гироскопа методом «первой производной»
Работу выполнил
студент группы 1421 Жирков Д.А.
Санкт-Петербург
04.05.08
1.Цель работы.
Изучение работы системы автоподстройки периметра ЛГ по вершине контура мощности генерации. В результате выполнения работы должна быть получена зависимость среднеквадратической ошибки стабилизации периметра от параметров ЛГ.
Целью работы является также ознакомление с методами нелинейного динамического моделирования в пакете Simulink.
2.Описание рабочей схемы.
Работа представляет собой построение в среде Simulink модели оптического дискриминатора «первой производной» и проведение исследований с использований этой модели.
Действие модели сводится к численному интегрированию, с предварительным вычислением входящих в интеграл функций.
Графическое изображение модели оптического дискриминатора «первой производной» показано на Рис.1.
Рис. 1.
Графическое изображение модели оптического дискриминатора «первой производной»
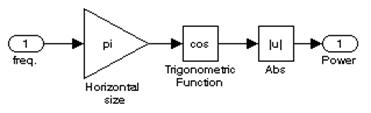
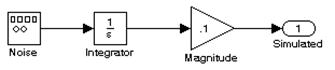
Контур мощности генерируемой моды ЛГ в зависимости от ее частоты задается блоком “Output power contour” (его описание будет дано ниже). После сложения с белым гауссовым шумом (блоки “White noise”, “Magnitude” и “Signal with noise”) сигнал мощности подается на двухкоординатный построитель “Contour “as is”” для наблюдения в исходном виде как зависимость от изменений периметра ЛГ, и на синхронный детектор системы АПЧ (перемножитель аналоговых сигналов) “Sinchronous detector”. Обычные еще в таких системах фотоприемник и узкополосный усилитель, помещаемые между ЛГ и синхронным детектором, здесь опущены без ущерба для общих характеристик модели, поскольку оптимизация системы стабилизации с учетом реальных параметров ЛГ не входит в задачу данной работы.
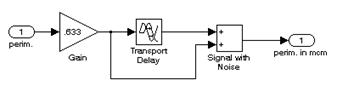
Сигнал, отражающий периметр ЛГ, или (что по смыслу то же самое) оптическую частоту генерируемой моды, присутствует на входе блока “Output power contour” (на выходе блока-сумматора “Total perimeter offset”). Полное отклонение частоты складывается из произвольного ухода, моделируемого блоком “Freedriftsimulator ” (будет описан ниже); опорной модуляции с блока “Frequency deviation”; и сигналом обратной связи, действующим с выхода синхронного детектора через блоки “Feedback gain” и “Feedback filter”. Линейный преобразователь “Feedback gain” в данной модели имеет орган плавной регулировки коэффициента передачи – “слайдер”, дающий возможность изменять величину и знак коэффициента обратной связи без прерывания процесса моделирования.
Для наблюдения процесса формирования контура первой производной «в чистом виде» (свободного от влияния шумов) в модели предусмотрено «переключение» с реального дрейфа на регулярное сканирование периметра ЛГ (из блока “SineWave”). Переключение режимов моделирования обеспечивается ключом “Scanningoption” (при двойном нажатии кнопки мыши по изображению ключа).
Опорный синусоидальный сигнал модуляции подается с генератора “Modulation” на синхронный детектор, а также через блок регулирования девиации “Perimeter deviation” (он также выполнен как «слайдер») – на ЛГ.
Сигнал обратной связи с выхода синхронного детектора сглаживается во времени фильтрами низких частот “Scope filter” (для наблюдения) и “Feedback filter” – для авторегулирования периметра. Характеристика “Scope filter” подобрана в данной модели исключительно для обеспечения удобства наблюдения флуктуаций сигнала обратной связи. Частотная характеристика фильтра низких частот “Feedback filter” реализует систему автоподстройки с астатизмом первого порядка и стандартными корректирующими звеньями.
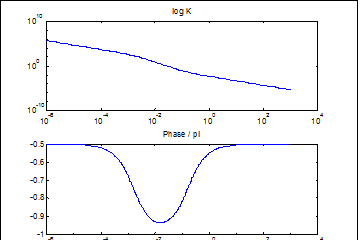
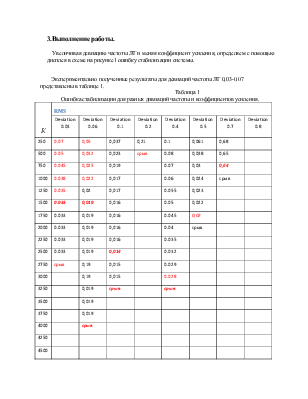
Рис. 2.
ЛАХ блока “Feedback filter”.
Блок “RMS” обеспечивает формирование медленно меняющегося сигнала, отражающего нестабильность частоты излучения ЛГ (описание дано ниже).
В модели для наблюдения режима стабилизации периметра имеются следующие блоки-индикаторы.
· Двухлучевой осциллограф “Modulation (arbitrary units)” для наблюдения сигнала модуляции периметра ЛГ и связанных с ними колебаний мощности излучения.
· Осциллограф “Perimeter offset quick” для наблюдения флуктуаций периметра в зависимости от времени в режиме стабилизации.
· Графопостроитель “Contour “as is”” для наблюдения контура мощности в зависимости от периметра ЛГ (он же позволяет косвенно отслеживать и изменения самого периметра: при этом изображающая точка «прорисовывает» контур искомой характеристики)
· Графопостроитель “1- st Derivative of Contour” для наблюдения контура первой производной в зависимости от периметра ЛГ (он также позволяет косвенно отслеживать изменения периметра)
· Двухлучевой осциллограф “Perimeter offset slow & RMS” для наблюдения и «цифровой вольтметр» “Display” для считывания среднеквадратического отклонения периметра относительно центрального положения.
· Графопостроитель “Correlation” для наблюдения «прохода» участка контура через область синусоидальной модуляции периметра.
Примечание: RMS – Root of Mean Square, корень квадратный из среднего квадрата. Эта величина определяет среднеквадратическое отклонение реального периметра от его искомого значения.
Ниже дано описание подблоков, входящих в модель.
|
a |
b |
|
c |
d |
Рис. 3.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.