Для выдачи курса потребителям служит сельсин-датчик М7 (С65ВДП). Ротор сельсина 2 жестко закреплен на оси 1 наружной рамы 9 подвеса и стабилизируется гироскопом. Статор 3 сельсина 1 укреплен в корпусе 4, который свободно вращается в подшипниках относительно корпуса прибора и через шестерню 6 связан редуктором 7 с двигателем М6. Механическая система, содержащая подвижный статор сельсина-датчика, редуктор 7 и двигатель М6, образует узел согласования большой скоростью гироагрегата ГА-6. При работе в составе курсовой системы этот узел используется для быстрого согласования гироагрегата с магнитным корректором, а при работе гироагрегата в режиме гирополукомпаса используется для разворота шкалы указателя УГР-4УК на заданный ортодромический курс. В последнем случае напряжение на двигатель М6 подается из пульта управления ПУ-26 при нажатии тумблера курсозадатчика в левую или правую сторону. Напряжение на обмотку возбуждения двигателя М6 подается через замыкающие контакты реле Р1, которое срабатывает при реализации указанных режимов работы узла.
В системе "оживления" опор средние обоймы 22 трехколечных подшипников внутренней оси подвеса приводятся во вращение двигателями М2 и М3 (ДИД-0ITA) с редуктором 15. Двигатели вращают опоры в разные стороны и через 73с изменяют направление вращения на обратные. В системе реверса используются два кулачка, концевые микровыключатели В2 и В3 и реле Р3и Р4, переключающие фазы питания одной из двух обмоток управления. Карданов подвес с подшипниками укреплен в корпусе прибора. Напряжение питания к нему подается через коллекторы неограниченного поворота 5 и 8.
В курсовой системе ГМК-1 гироагрегат ГА-6 работает совместно с пультом управления ПУ-26. На рисунке 6 показана лицевая панель пульта, где цифрами обозначены: 1 – переключатель знака широтной коррекции, 2 – сигнальная лампа завала гироузла, 3 - переключатель выбора режима работы ГМК-1, 4 – лампы подсветки, 5 – тумблер со средним положением задатчика курса, 6 – ручка ввода широтной поправки, 7 – тумблер системы контроля азимутальной коррекции. Упрощенная электрическая схема пульта ПУ-26 приведена на рисунке 7. Широтный компенсатор собран по мостовой схеме. Плечи моста образованы потенциометром R3

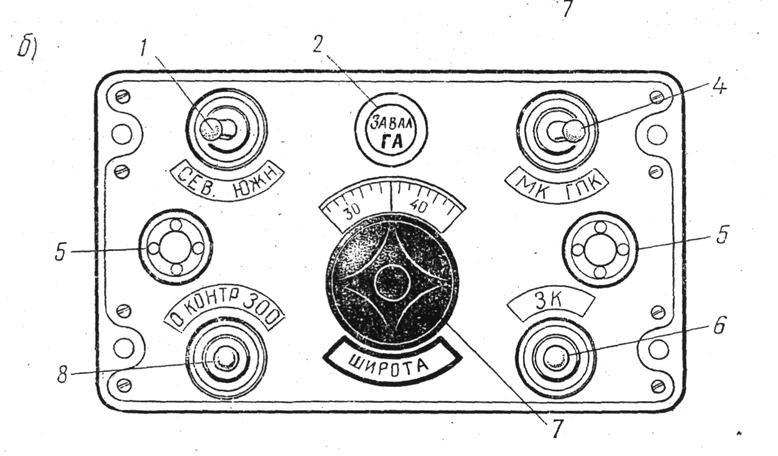
Рисунок 6 – Передняя панель пульта управления ПУ-26
 |
|||
|
|||
компенсации собственного ухода ГА-6 и потенциометром R6 компенсации видимого ухода. Мост запитывается через трансформатор Тр от сети переменного тока. Сигнал снимаемый с другой диагонали (движки потенциометров R3 и R6) является алгебраической суммой вносимых поправок на собственный и видимый уходы гироскопа. Этот сигнал поступает по электрической линии на двигатель М5 гироагрегата. Резистор R2 и потенциометр R1 используются для настройки чувствительности мостового датчика при работе с разными экземплярами гироагрегатов. С помощью потенциометра R5 осуществляется регулировка моста при установке R6 в положение j=0. При эксплуатации курсовой системы в южном полушарии знак широтной поправки должен быть изменен. Это достигается с помощью переключателя S1.
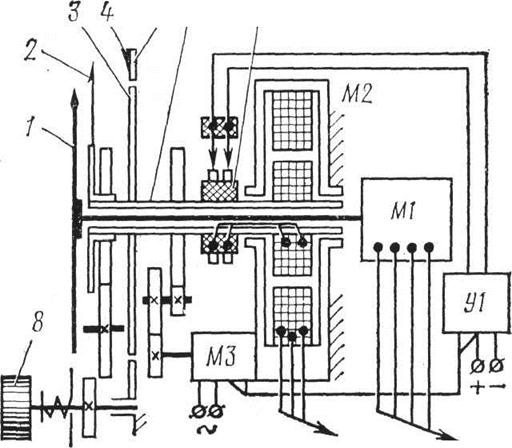
Отображение курсов, в том числе и ортодромического, осуществляется в курсовой системе ГМК-1 с помощью указателя УГР-4 УК. Кинематическая схема указателя УГР-4 УК приведена на рисунке 8.
|
|||
|
||||
|
||||
Рисунок 8 - Кинематическая схема УГР-4УК
В системе передачи ортодромического курса в указателе участвуют три элемента: сельсин-приемник М2 (С65ВПЭП) усилитель У1 и отрабатывающий двигатель М3 (ДИД-0,5). Синхронизирующие обмотки сельсина М2 связаны электрическими цепями с синхронизирующими обмотками сельсина-датчика, установленного на наружной раме карданова подвеса ГА-6. Сигнал с роторной обмотки поступает на вход усилителя У1 и после усиления на обмотку управления двигателя М3. В результате вращения двигателя дистанционная следящая система согласовывается. При этом двигатель разворачивает полую ось 6 со шкалой 3, по которой относительно неподвижного индекса 4 отсчитывается гироскопический курс. Вокруг полой оси 6 с помощью кремальеры 8 разворачивается курсозадатчик 2 и устанавливается по шкале 3 на заданное значение курса. При полете с курсом равным заданному, курсозадатчик 2 находится против индекса 4. В указателе сельсин-приемник М1 служит для передачи радиопеленга от АРК. Стрелка по подвижной шкале 3 показывает радиопеленги, а по неподвижной 5 – курсовые углы.
ОПИСАНИЕ ЛАБОРАТОРНОГО СТЕНДА
Лабораторный стенд (рисунок 9) в своем составе содержит: рабочий стол оператора 1, поворотный кронштейн 2 с установленным на его платформе гироагрегатом ГА-6, специализированный блок питания СБП-1 3, блок управления и регистрации 4, соединительный кабель 5.
 |

Рисунок 9 - Общий вид лабораторного стенда
Блок питания 3 кабелем через розетку, установленную на его тыльной стороне, подключается к сети 220В 50Гц.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.