Основным режимом работы курсовой системы является режим гирополукомпаса, обеспечивающий определение ортодромического курса в любых условиях полета. Измерителем ортодромического курса и является гироагрегат ГА-6.
Чувствительным элементом гироагрегата ГА-6 является курсовой гироскоп с горизонтальным и свободным в азимуте расположением оси собственного вращения.
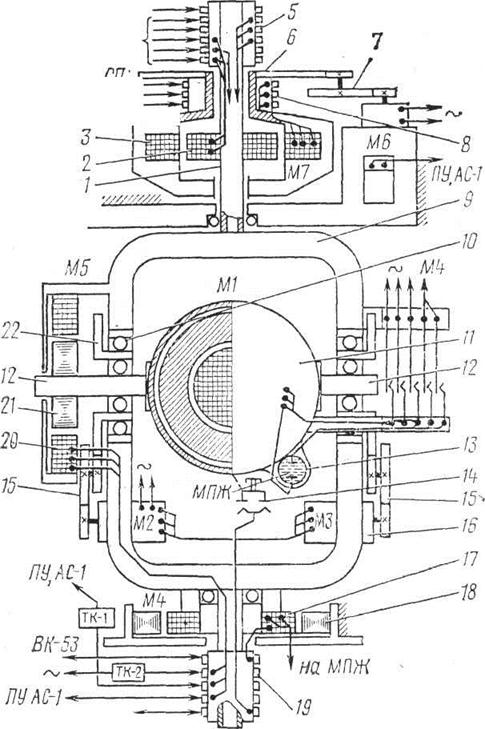
Кинематическая схема гироагрегата ГА-6 приведена на рисунке 3, а электрическая – на рисунке 4. Прибор содержит гироскопический узел, систему горизонтальной коррекции, двигатель широтной коррекции, сельсин-датчик курса, узел согласования большой скоростью, систему вращающихся подшипников, позволяющую снизить трение по внутренней оси подвеса гироузла.
Гироскопический узел (гиромотор ГМВ-524) представляет собой сдвоенный трехфазный асинхронный двигатель М1 с короткозамкнутой роторной обмоткой. Гиромотор помещен в герметизированный корпус 11, заполненный водородом. На корпусе гиромотора закреплены балансировочные грузы и жидкостный маятник 13. Корпус гиромотора 11 выполняет функцию внутренней рамы карданова подвеса , а полуоси 12, закрепленные на корпусе, образуют ось внутренней рамы. Гироузел поворачивается на оси на вращающихся подшипниках 10, установленных на наружной раме 9. Повороты гироузла ограничены в пределах ±80° упорами, которые конструктивно совмещены с контактами 14, замыкающими минусовую цепь лампы сигнализации на пульте управления курсовой системы ГМК-1 при наличии завала гироузла.
Система горизонтальной коррекции состоит из чувствительного элемента и исполнительного устройства. Чувствительным элементом служит одноосный жидкостный маятник 13, а исполнительным устройством – моментный двухфазный асинхронный двигатель М4, работающий в заторможенном режиме. Ротор 17 двигателя, на котором размещены две обмотки управления и обмотка возбуждения, укреплен на наружной раме 9, а короткозамкнутым статор 18 установлен в корпусе гироагрегата. Фрагмент электрической схемы гироагрегата, поясняющий работу
|
|
+27В |
|
![]()
|
||||
|
||||
Рисунок 3 - Кинематическая схема ГА-6
горизонтальной коррекции, приведен на рисунке 5. Обмотки управления 0У1 и 0У2 двигателя горизонтальной коррекции подключены встречно к фазам 1 и 2 питающей сети через плечи электролитического маятника МПЖ. При горизонтальном положении гироузла сопротивления плеч маятника одинаковы и в обмотках 0У1 и 0У2 текут одинаковые токи, создающие одинаковые, но разнонаправленные моменты двигателя. Суммарный момент при этом равен нулю. При отклонении от плоскости горизонта сопротивление одного из плеч электролитического маятника увеличивается, а другого пропорционально уменьшается. В результате токи в обмотках управления оказываются разными, что приводит к появлению корректирующего момента. Фаза 3, питающая обмотку возбуждения поступает через нормально-замкнутый контакт выключателя коррекции ВК-53Б. На вираже этот контакт размыкается и обмотка возбуждения запитывается от фазы 3 через ограничивающий резистор R, что ведет к
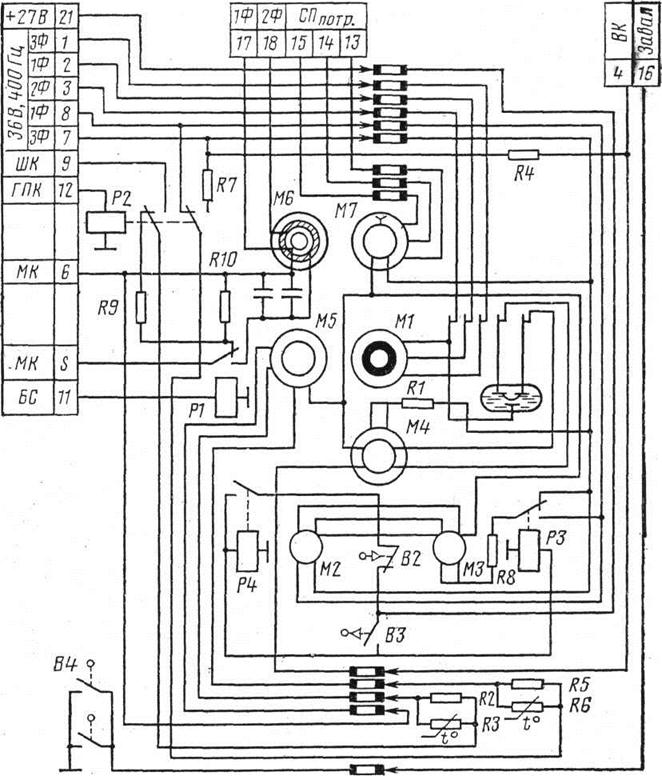
Рисунок 4 - Электрическая схема ГА-6
уменьшению тока возбуждения и, соответственно, корректирующего момента. Тем самым достигается уменьшение виражной погрешности гироагрегата.
Двигатель широтной (азимутальной) коррекции М5 обеспечивает создание момента относительно оси внутренней рамы гироскопа. Этот двигатель также асинхронный двухфазный с короткозамкнутым ротором. Ротор 21 посажен на полуось 12, а статор с обмотками 20 закреплен на наружной раме. Когда курсовая система работает в режиме гирополукомпаса (ГПК) на управляющую обмотку двигателя с датчика широтной коррекции пульта управления подается сигнал компенсации видимого ухода и разбаланса гироскопа. При работе ГА-6 совместно с магнитным корректором на управляющую обмотку статора 20 через усилитель подается сигнал
![]()
![]()
![]()
![]()
![]()
|
|

 |
||||||||||||||
 |
||||||||||||||
|
||||||||||||||
|
||||||||||||||
|
||||||||||||||
|
||||||||||||||
 |
||||||||||||||
Рисунок 5 - Схема горизонтальной коррекции гироагрегата ГА-6
рассогласования гироскопического и магнитного курсов. В результате возникает управляемая прецессия гироскопа относительно наружной оси подвеса, в процессе которой положение наружной рамы согласовывается с положением магнитного меридиана. Резисторы R2, R3 и R5, R6 обеспечивают температурную компенсацию характеристик двигателя широтной (азимутальной) коррекции.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.