МГТУ им. БауманаДомашнее задание по УТС “Расчет линейной следящей системы для дистанционного управления углом положения суппорта”. Студент Леконцев группа ПМТ2-71 Фамилия И.О. Подпись Дата Проверил Пельпор . Фамилия И.О. Подпись Дата Подлипки 1999 год. |
Функциональная схема.
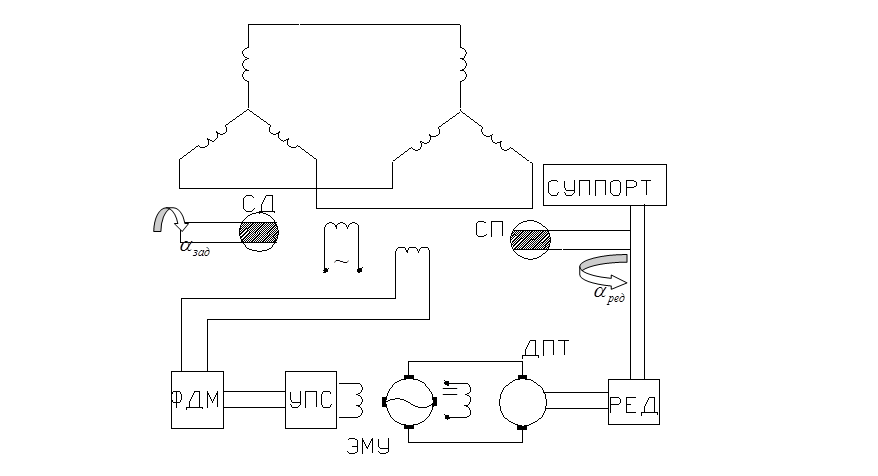
Задающий вал связан с выходным валом по угловому положению сельсинной парой, реализующей обратную связь. Выходное напряжение СП по переменному току преобразуется с помощью ФДМ (фазноволновой Д-модулятор), усиливается по напряжению с помощью УПТ (усилитель постоянного тока), поступает на управляющую обмотку ЭМУ (электромагнитный усилитель). Нагрузкой ЭМУ является якорная обмотка ДПТ (двигатель постоянного тока) с независимым возбуждением. Двигатель через редуктор связан с суппортом, являющимся нагрузкой следящей системы СС.
Задание к расчёту:
1. Составить передаточные функции функциональных элементов, найти ПФ разомкнутой и замкнутой АС и ПФ для ошибки. Построить ЛЧХ разомкнутой АС.
2. Определить устойчивость исходной системы по Гурвичу и Михайлову. По ЛЧХ оценить устойчивость исходной системы по Найквисту.
3.
![]() Спроектировать последовательное корректирующее устройство,
обеспечивающее следующие качественные точностные показатели:
Спроектировать последовательное корректирующее устройство,
обеспечивающее следующие качественные точностные показатели:
![]() а) перелегулирование ;
а) перелегулирование ;
![]() б) время переходного процесса
б) время переходного процесса
в) установившуюся ошибку по скорости при заданной скорости вращения заданного вала равной 10 [град/сек].
4. Построить переходный процесс скорректированной схемы :
Структурная схема.
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Дифференциальные уравнения, описывающие элементы рассматриваемой САР:
1) Сельсивная пара с ФДМ:
2)
![]() Усилитель постоянного тока УПТ:
Усилитель постоянного тока УПТ:
3) ЭМУ (электронный усилитель):
 |
4)
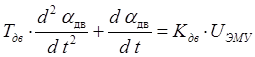 ДПТ с независимым возбуждением :
ДПТ с независимым возбуждением :
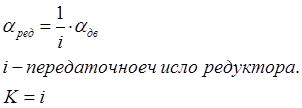
5) Редуктор:
 Дано:
Дано:
Решение:
I Запишем ПФ функциональных элементов:
![]()
![]() 1) ПФ сельсинной пары с ФДМ, для которой входным
воздействием является
1) ПФ сельсинной пары с ФДМ, для которой входным
воздействием является
![]() , а выходным величина . Сельсинная пара с ФДМ-идеальное усиленное
звено. :
, а выходным величина . Сельсинная пара с ФДМ-идеальное усиленное
звено. :
![]()
![]() 2) ПФ усилителя
постоянного тока, для которой входным воздействием является , а входным
величина . УПТ-идеальное усилительное звено.
2) ПФ усилителя
постоянного тока, для которой входным воздействием является , а входным
величина . УПТ-идеальное усилительное звено.
![]()
![]()
![]() 3) ПФ электромагнитного усилителя, для которой
входным воздействием является
3) ПФ электромагнитного усилителя, для которой
входным воздействием является
 , а выходным величина . ЭМУ-оперативное звено 1-го порядка.
, а выходным величина . ЭМУ-оперативное звено 1-го порядка.
![]()
![]() 4) ПФ двигателя постоянного тока, для которой входным
воздействием является ,
4) ПФ двигателя постоянного тока, для которой входным
воздействием является ,
а выходным величина . ДПТ-инерциальное интегрирующее звено.
 |
|||||
6) ПФ редуктора, у которой входным воздействием является , а выходным .
![]() Редуктор-идеально
усиленное звено.
Редуктор-идеально
усиленное звено.
ПФ разомкнутой АС:
Оборвав ООС, получим разомкнутую АС из 5-ти последовательно соединенных функционально элементов. При этом выходная величина каждого предыдущего
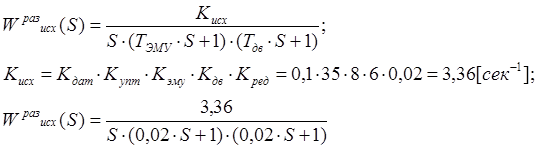 является
входным воздействием каждого последующего элемента.
является
входным воздействием каждого последующего элемента.
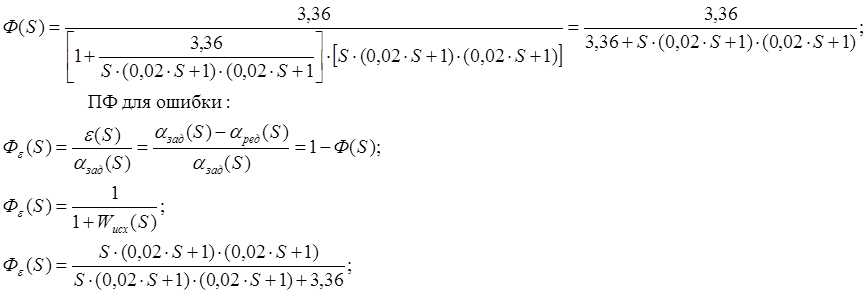
ПФ замкнутой АС:
Поскольку данная замкнутая АС имеет единичную ООС, то передаточная функция для неё будет иметь вид:
 |
Построение ЛАЧХ и ЛФЧХ разомкнутой АС:
Асимптотическая логарифмическая амплитудно-частотная характеристика состоит из трёх асимптот:
![]() 1. От 0 до , под
наклоном-20дб/дк, т.к.
1. От 0 до , под
наклоном-20дб/дк, т.к.
![]()
![]() первый порядок астатизма.
первый порядок астатизма.
От до , под наклоном-40дб/дк, т.к.
второй порядок астатизма.
![]()
От и далее, под наклоном-60дб/дк, т.к.
третий порядок астатизма.
В данном случае асимптота под наклоном – 40 дб/дк не строиться, т.к. частоты сопряжений равны.
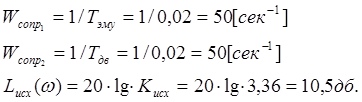 Частоты
сопряжения для ЛАЧХ:
Частоты
сопряжения для ЛАЧХ:
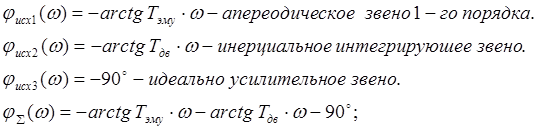
Построение ЛФЧХ отдельно для каждого из трёх различных звеньев:
 |
|
|
|||
|
1 |
-1,15 |
-1,15 |
-2,30 |
|
10 |
-11,3 |
-11,3 |
-22,6 |
|
100 |
-63,4 |
-63,4 |
-126,8 |
Сопоставление ЛАЧХ и ЛФЧХ позволит сделать вывод, что исходная система устойчива.
Необходимо построить такую желаемую характеристику, которая обеспечила требуемые
![]() .
.
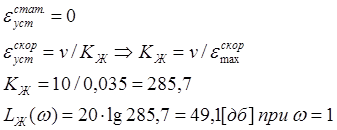
![]() Построение Lж(w) начинается с низкочастотной области. Её уровень
определяется величиной коэффициента передачи Kж:
Построение Lж(w) начинается с низкочастотной области. Её уровень
определяется величиной коэффициента передачи Kж:
Поскольку рассматриваемая система является астатической 1-го порядка, то:
 |
Наклон асимптоты среднечастотной области желательно выбрать – 20 дб/дк, т.к. соответствует увеличению демпфирующих свойств системы.
Исходя из заданных требований:
 |
Асимптоту высокочастотной области строим с максимально отрицательным наклоном, т.е. – 60дб/дк,что определяет подавление высокочастотных полях.
Длина СЧ асимптоты ограничена двумя частотами ординаты которых равны 15-20 дб. Сопряжение СЧ и НЧ асимптоты возможно с помощью асимптоты с наклоном – 40 дб/дк.
II Анализ устойчивости исходной АС:
1.
![]() По Гурвину.
По Гурвину.
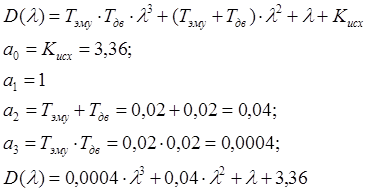
Сопоставим характеристический многочлен
 |
 Применив
к этому выражению обратное преобразование Лапласа, получим дифференциальное
уравнение, описывающее рассматриваемую АС.
Применив
к этому выражению обратное преобразование Лапласа, получим дифференциальное
уравнение, описывающее рассматриваемую АС.
 Для
этого диф. Ур. Можно составить характеристический многочлен:
Для
этого диф. Ур. Можно составить характеристический многочлен:
Для того, чтобы соответствовал устойчивости АС необходимо и достаточно, чтобы были положительны все глав. Диагональные миноры определителя Гурвина:
 |
1.По Михайлову.
АС будет устойчива, если при возрастании частоты от 0 до ¥, вектор D(jw) повернётся на угол pn/2, где n – степень урав. D(l)=0 или, что тоже самое, если характер – кая кривая
При изменении частоты от 0 до ¥,начиная с положительной действительной оси, обходит последовательно в положительном направлении( против часовой стрелки), n – квадратов.
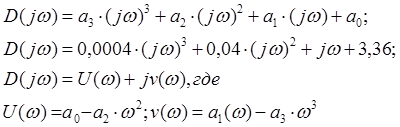 |
Для построения хар-кой кривой достаточно определить точки пересечения с действительной осью:
 |
Все отрицательные корни не удовлетворяют возрастанию частоты от 0 до ¥. След-но пересичение с осью произойдёт при w1=0 и w2=50
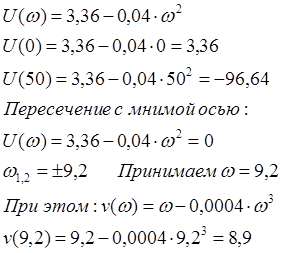 При этом:
При этом:
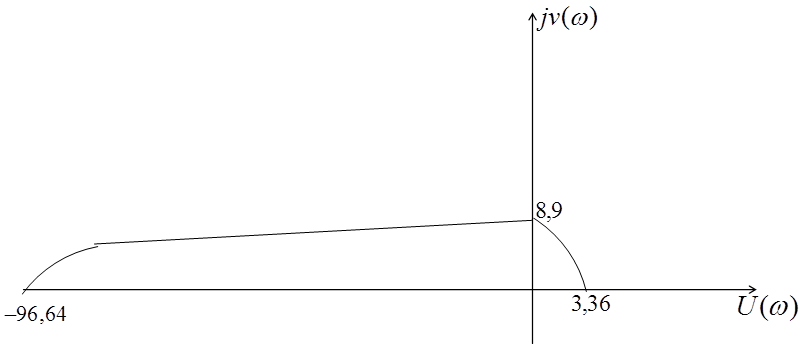 |
По виду кривой можно сделать вывод, что рассматриваемая АС устойчива.
2. По Найквисту:
Рассмотрев логарифмические хар-ки разомкнутой системы видно, что при всех частотах, при которых ЛАЧХ положительна, значение фазы не превышают -p (-180°), т.е. wсреза <wp. Следовательно система устойчива в замкнутом состоянии.
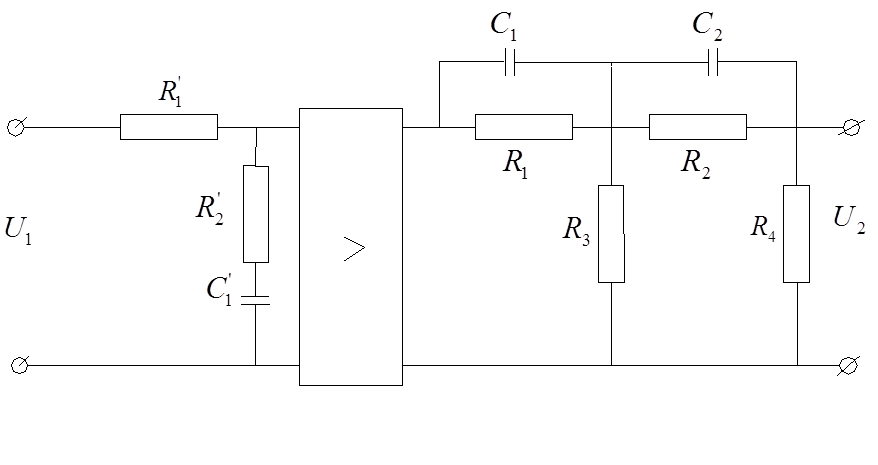
III Для построения последовательно корректирующего устройства необходимо определить его ЛАЧХ, а для этого необходимо найти разомкнутую м/д желаемой ЛАЧХ и ЛАЧХ исходной разомкнутой АС.
![]() Вычисление
производится графически по ф-ле:
Вычисление
производится графически по ф-ле:
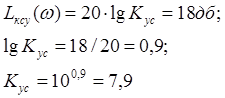 Коэф.
Усиления этого усилителя определяется графически:
Коэф.
Усиления этого усилителя определяется графически:
 |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.