

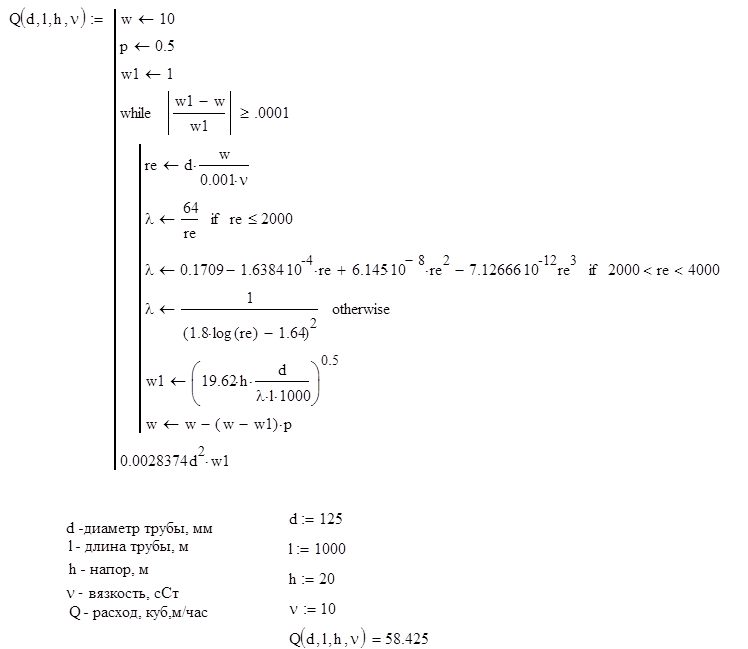
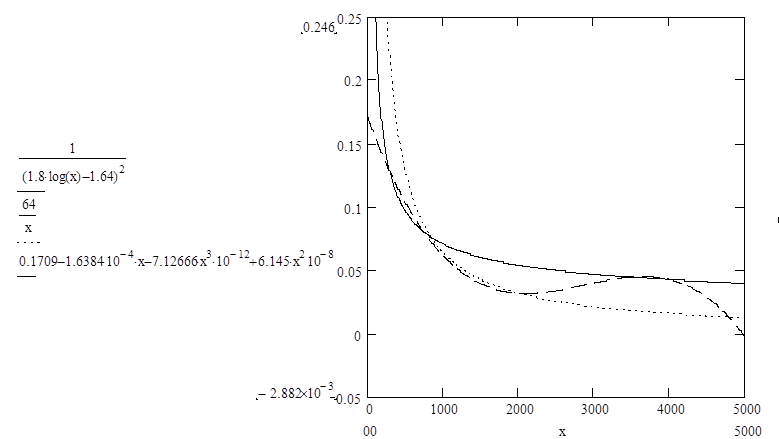
При аппроксимации функции несколькими зависимостями необходимо соблюсти точную стыковку участков не допуская разрывов.
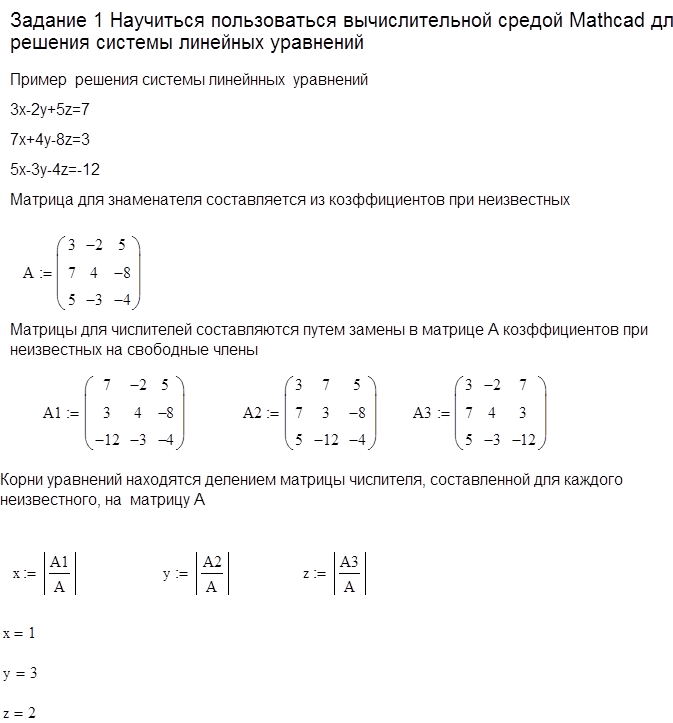
Задача 1 Построение расходных характеристик
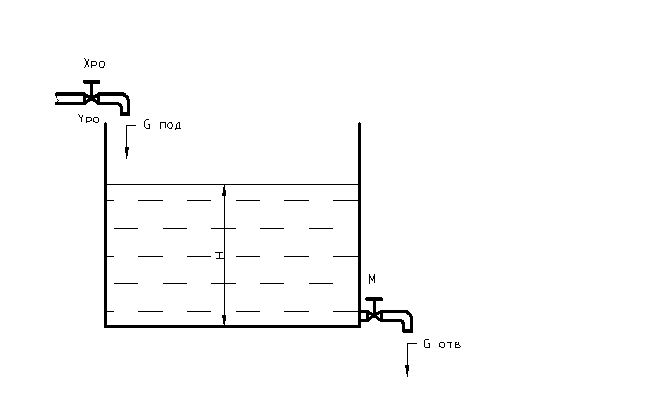
Имеется расходный бак, из которого расходуется то или иное количество жидкости, и в который по мере надобности такое же количество жидкости добавляется.
Расход жидкости зависит от положения выходного крана М и уровня в баке Н.
При постоянной площади сечения трубопровода расход пропорционален скорости W.
Будем считать, что сопротивление на выходе сосредоточено в выходном кране М.
Тогда ![]()
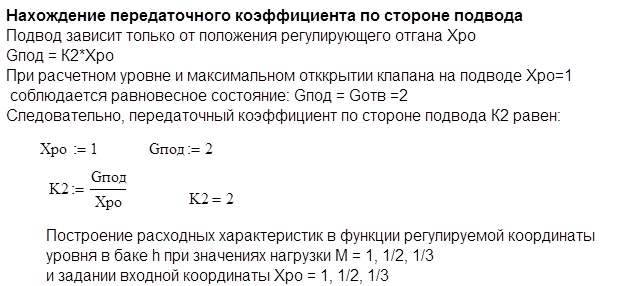
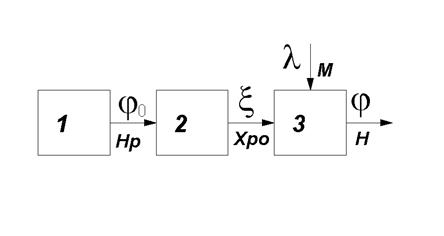
Подвод жидкости не зависит от уровня Н, а зависит только от входной координаты регулирующего органа Хро.
Известно, что:
- при расчетном уровне Н=4 Gотв =2.
- в равновесном состоянии при максимальном открытии впускного и выпускного кранов уровень в баке Н = 4
Задание:
- определить, какому принципу управления соответствует данная системы, считая выходной координатой уровень жидкости в баке
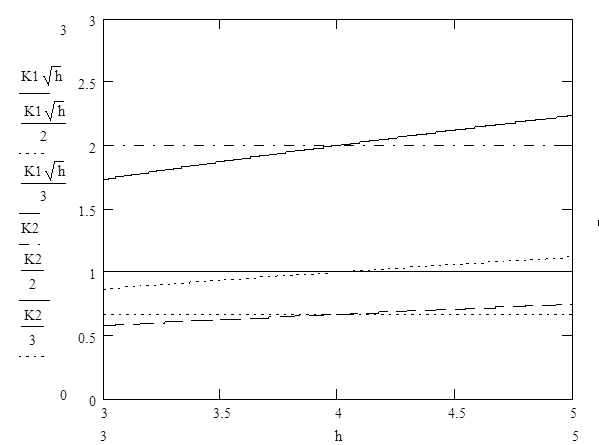
-построить расходные характеристики подвода и отвода жидкости для диапазона допустимых значений уровня жидкости Н от 3 до 5 и для трех разных положений кранов на входе и на выходе (коэффициенты сопротивления соотносятся как 1, 2, 3.
-предложить изменения в структурной схеме, улучшающие свойства системы регулирования.
Нахождение передаточного коэффициента по стороне отвода К1
Gотв=К1*М*![]() , где М - нагрузка,
задаваемая положением регулирующего органа на отводе.
, где М - нагрузка,
задаваемая положением регулирующего органа на отводе.
Полное открытие регулирующего органа соответствует относительному значению нагрузки M=1
В системе реализуется принцип разомкнутого управления:
Применение оператора дифференцирования к расчету переходной характеристики звена первого порядка
Для решения дифференциального уравнения удобно ввести оператор дифференцирования D.

К оператору дифференцирования применимы обычные правила алгебры в случае операций с константами и операций возведения его самого в положительную степень. Запишем дифференциальное уравнение второго порядка в виде:
aD2y+bDy+cy=0
Чтобы данное уравнение превратилось в обычное квадратное уравнение необходимо, чтобы в производной повторялась сама функция y, и производные отличались только показателями степени константы перед повторяемой общей частью. Единственной функцией, отвечающей данным условиям, является функция y=Aemx. Тогда дифференциальное уравнение преобразуется к виду:
aAm2· emx + bAm· emx+ cA· emx =0
A· emx (am2 + bm + c ) =0
Уравнение (am2 + bm + c ) =0 называется характеристическим.
Корни характеристического уравнения вычисляются по формуле:
Если b2 > 4ac, существует два действительных корня α и β. Решение в общем виде можно записать так:
y=Aeα x+ Beβ x
Если b2 = 4ac, существует два равных корня α. Решение в общем виде можно записать так:
y = (A + B) eα x
Если b2 < 4ac, существует два комплексных корня этого уравнения α и β. Решение записывается в виде:
y = (Acos βx + Bsin βx) eα x
Константы А и В определяются граничными условиями.
Рассмотрим систему первого порядка
Характеристическое уравнение получается путем замены оператора дифференцирования на алгебраическую переменную m и приравнивания x к 0.
Тогда решение уравнения для переходного режима y=Aemt примет вид: y=Ae-t/τ .
Рассмотрим теперь скачек на входе в систему.
Для установившегося режима величина Dy равна 0, x = 1, y/x=b0/a0. Эти условия дают частное решение уравнения:

Следовательно, в общем виде решение уравнения будет представлять собой сумму:
Найдем величину А, исходя из граничных условий: при t = 0 y = 0 x =1
Отсюда полное решение уравнения для переходного и установившегося режима примет вид:
График переходной функция для звена первого порядка при b0 = a0 показан на рис.
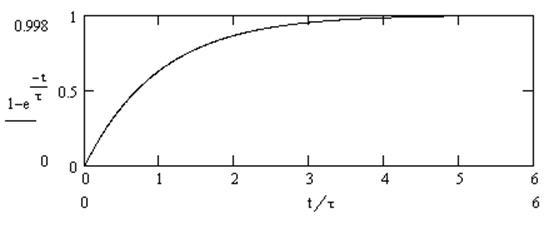
Через промежуток времени, равный 5 τ, соотношение между выходным и входным сигналом установится постоянным и равным b0/a0.
В системах терморегулирования ДВС в качестве управляемой координаты используется температура среды. Ее замер осуществляется динамическим звеном первого уровня. Рассмотрим пример, когда датчик температуры, находящийся в потоке жидкости с температурой Т подвергается резкому изменению температуры жидкости до значения Т1. Датчик температуры – термопара, помещенная в гильзу, заполненную маслом с массой m и теплоемкостью c. Будем считать, что теплопередача линейно зависит от разности температур.
Скорость передачи тепла к датчику:
dQ/dT =k(T1-T)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.




