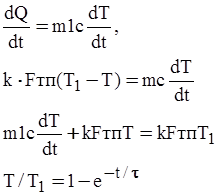
Одновременно количество воспринятого датчиком тепла δQ, подведенного за время δt, приведет к изменению его температуры на величину δT в соответствии с выражением:
δQ = m·c· δT
Тогда
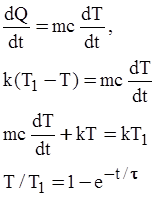
где τ =mc/k
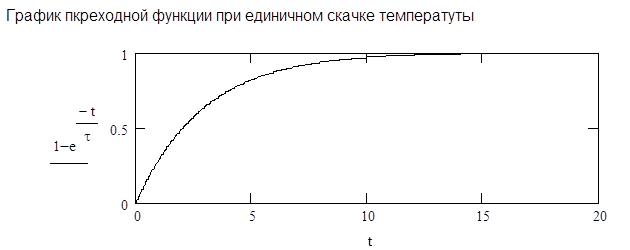
Так как в конце переходного периода температуры потока и датчика выравниваются, т.е. Т / Т1=1, график переходной функции не будет зависеть от температуры.
Имеется чувствительный элемент датчика температуры, размещенный в трубопроводе. Датчик находится в защитной гильзе, заполненной маслом. Гильза имеет диаметр 5мм и длину 50 мм.
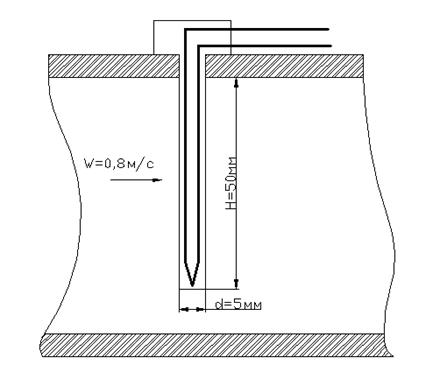
Считается, что температура масла соответствует температуре чувствительного элемента. Датчик помещен в поток воды со скоростью 0,8 м/с.
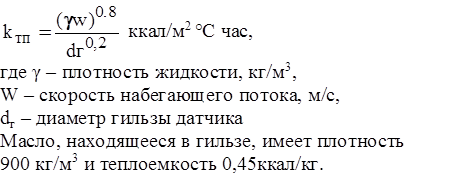
Коэффициент теплопередачи рассчитывается по формуле:
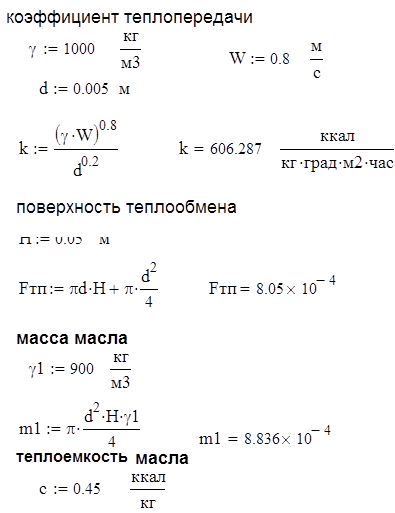
Уравнение теплопередачи в дифференциальной форме
Постоянная времени τ, в секундах:
![]()
![]()
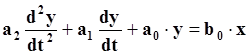
Колебательное звено относится к динамическим звеньям второго порядка и описывается дифференциальным уравнением:
Как следует из правил преобразования по Лапласу, вторая производная функции y(t) преобразуется в трехчлен:
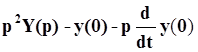 , первая производная преобразуется
в двучлен:
, первая производная преобразуется
в двучлен:
![]() , где y(0)
– значение функции при t = 0.
, где y(0)
– значение функции при t = 0.
Вычитание двух функций а0y – b0x преобразуется в a0Y(p)-b0X(p).
Если при t
= 0 y(0) = 0 и  ,
дифференциальное уравнение преобразуется в алгебраическое:
,
дифференциальное уравнение преобразуется в алгебраическое:
a2p2Y(p)+ a1pY(p)+a0Y(p)=b0X(p)
Передаточная функция:

Учитывая, что b0/a0 – это передаточная функция в статическом режиме W,
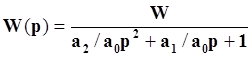
Дальнейшие преобразования сводятся к искусству разложения многочлена на множители. Принимая во внимание, что звено второго порядка может быть записано через величины собственной частоты колебания ω и коэффициент затухания σ,
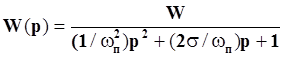
Рассмотрим выходной сигнал при скачкообразном сигнале на входе.
![]()
Так как X(p) = 1/p,

После преобразований выражение принимает следующий вид:

При критическом затухании, т.е. при σ = 1,
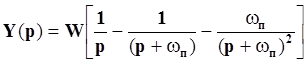
Используя таблицу преобразований Лапласа, конвертируем решение, полученное в Лапласовой форме, в функцию, зависящую от времени:
![]()
Примером системы второго порядка является пружинная система с демпфированием (рис.1).
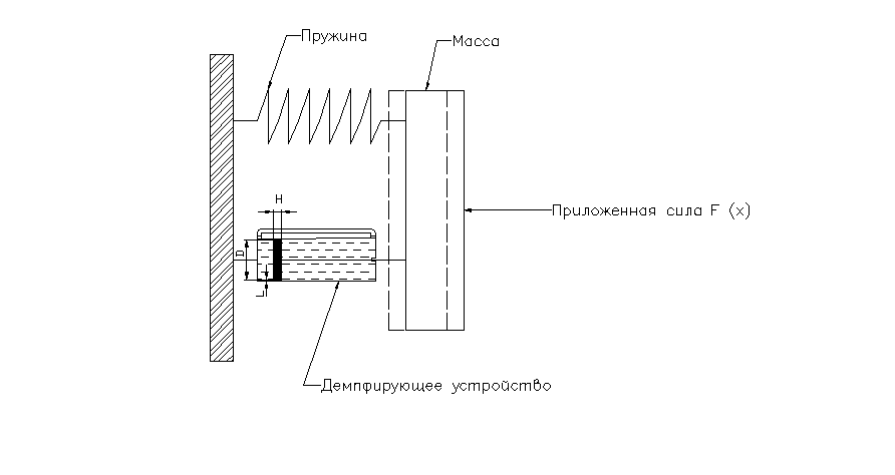
Рис.1
Система включает три основных элемента: массу, пружину и демпфирующее устройство – поршень, перемещающийся в цилиндре, заполненном маслом. Входным сигналом является сила F, выходным – длина пружины y .Результирующая сила, действующая на массу m, равна разности приложенной силы F, силы упругости пружины (от растяжения или сжатия), и силы демпфирующего устройства.
Сила упругости пружины пропорциональна изменению ее длины y, т.е. ее можно представить в виде ky, где k – коэффициент жесткости пружины.
Сила демпфирующего устройства будет пропорциональна скорости перемещения поршня, т.е. ее можно представить в виде c(dy/dt), где с –константа.
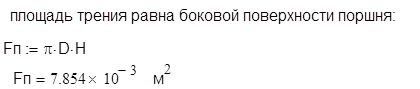
где μ – коэффициент динамической вязкости жидкости, l – зазор между трущимися поверхностями, Fп – поверхность трения.
Результирующая сила R, действующая на массу m, будет равна:
По второму закону Ньютона эта сила заставляет массу двигаться с ускорением. Т.к. ускорение – производная скорости, а скорость – производная перемещения (dy/dt)
В случае отсутствия демпфирующего устройства масса, прикрепленная к концу пружины,, будет колебаться с собственной частотой

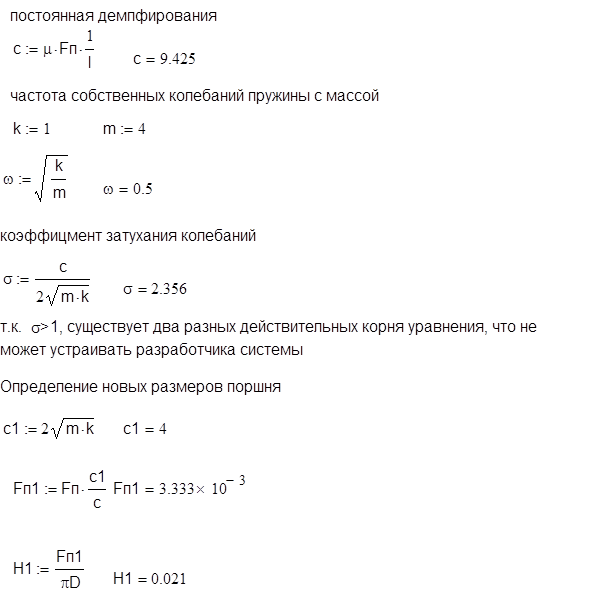
Колебательные системы характеризуются коэффициентом затухания σ, определяемым как:

Тогда уравнение движения системы приобретает вид:
Задача 3 Расчет переходной функции звена второго порядка с помощью преобразования Лапласа
Пружинная система с демпфированием (рис. 1)состоит из:
-пружины с коэффициентом жесткости k=1н/м;
- прикрепленной массы m=4кг;
- системы демпфирования с поршнем, двигающимся в цилиндре с маслом, имеющей следующие характеристики: коэффициент динамической вязкости касторового масла
m = 1,2 кг/сек м; диаметр поршня D = 5 см, высота поршня H = 5см, зазор между поршнем и цилиндром l =1мм.
Требуется;
- найти частоту собственных колебаний пружины с массой m и коэффициент затухания колебаний
- изменить размеры демпфирующей системы с целью получения коэффициента затухания колебаний равного 1.
![]()
Переходная функция строится для единичного скачка входной координаты – приложенной к пружине силы F, следовательно F = 1.
по преобразованию Лапласа
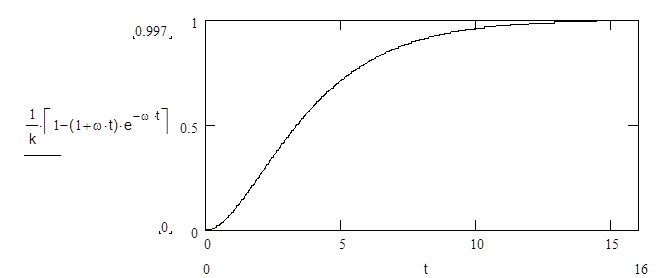
y/F=1/k[1-exp(-wt)(1+wt)]
График переходной функции
![]()
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.