 (4.4)
(4.4)
Из уравнения:
 (4.5)
(4.5)
находится выражения для i, при котором ускорения нагрузки будет максимальным:
 (4.6)
(4.6)
В выражении 4.6 ![]() считается неизвестным.
Полагая, что Емех.мах обеспечивается при номинальной
скорости электродвигателя wдв.н,
запишем другое требование к iопт:
считается неизвестным.
Полагая, что Емех.мах обеспечивается при номинальной
скорости электродвигателя wдв.н,
запишем другое требование к iопт:
 (4.7)
(4.7)
где wмехmax - максимальная скорость нагрузки, тогда
 (4.8)
(4.8)
После преобразования уравнения 4.8 получим:
 (4.9)
(4.9)
Теперь, подставляя значения iопт из 4.6 и Jдв из 4.9 в выражение 4.4, получим формулу для минимального требуемого значения момента электродвигателя:
 (4.10)
(4.10)
Потребная максимальная мощность двигателя определяется так:
 (4.11)
(4.11)
Таким образом, выбор iопт и электродвигателя по рассматриваемой методике включает:
- определение Рдв.min из выражения 4.11
- определение Jдвw2дв.номиз выражения 4.9
- выбор серии двигателей с номинальной мощностью Рдв.н³ Рдв.min двигателя с требуемым по 4.9 значением произведения Jдвw2дв.ном; 4.9, 4.10
- определение iопт из 4.6
При необходимости расчет повторяется.
Другой метод выбора iред
Проблема согласования двигателя с нагрузкой решается различно, в зависимости от условий его выбора:
Рдв.ном=Рнагр.мах (4.12)
![]() (4.13)
(4.13)
Где ![]() Мнагр.мах =Мсм + Jм
Емех
Мнагр.мах =Мсм + Jм
Емех
Действительно, шкала мощностей двигателей, приводимая в каталоге, является дискретной. Так, например, для двигателей серии ДГ имеем:
Таблица 4.1
|
Рдв [Вт] |
0,1 |
0,5 |
1,0 |
2,0 |
5,0 |
10,0 |
|
Тип дв. |
DИD-0,1 |
DИD-0,5 |
DИD-1 |
DИD-2 |
DИD-5 |
DИD-10 |
В силу дискретности ряда мощностей имеющихся двигателей выполнение условия
Рдв.ном = Рнагр.мах (4.14)
теоретически исключено.
В случае выбора двигателя из условия 4.14 параметры редуктора находятся просто:
Рдв.ном = Мном wном = Мнагр.мах wнагр.мax (4.15)
Отсюда передаточное число редуктора:
 (4.16)
(4.16)
Где wном.дв – берется из паспорта двигателя, а
wнагр.max – из задания.
Рассмотрим идею выбора i в случае Рдв.ном³Рнагр.мах. Для этого рассмотрим характеристики идеализированного двигателя (рис. 4.5). Мощность, отдаваемая двигателем в нагрузку в этом случае меньше номинальной. Обозначим ее Р'дв. Формально на характеристиках двигателя есть две рабочие точки «А» и «В», удовлетворяющие условию 4.13. Это обстоятельство исключает возможность однозначного определения передаточного числа редуктора, как это было в первом случае.
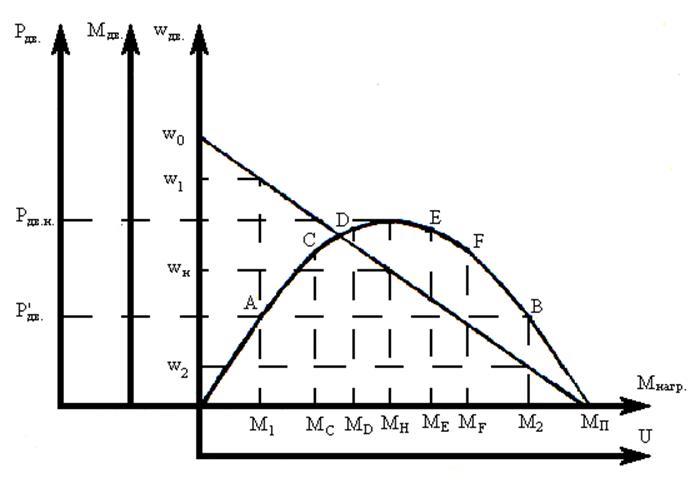
Рис. 4.6
Как следует из рисунка 4.6, согласование двигателя может быть проведено к любой из упомянутых точек. При этом передаточные числа будут соответственно равны:
 (4.17)
(4.17)
 (4.18)
(4.18)
Очевидно, что ia>ib, а моменты, нагружающие двигатель будут связаны соотношением: М1<М2.
В обеих точках двигатель отдает в нагрузку требуемую, расчетную мощность. Различие заключается в том, что при выборе точки «В» двигатель оказывается нагруженным большим моментом: М1<М2, а, следовательно, статическая ошибка системы в точке «А», меньше, чем в точке «В». Это легко видно из рис. 4.7.
Рис. 4.7
С другой стороны, удлинение редуктора в случае ia означает увеличение люфтов, изгибных колебаний, что в конечном итоге ухудшает устойчивость системы.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.