В данном случае длительность процесса обеспечивается
общей инерционностью системы , и необходимостью фактически двойного изменения
угла крена, что приводит систему в состояние , при котором на предельном
управлении она движется очень ограниченное время , остальное же можно
рассматривать как переходный процесс до и после такого движения.
ЗАКЛЮЧЕНИЕ
Решение задачи оптимального управления методом Красовского подходит для нахождения решения компромиссного характера для всей системы , для всей системы , и далеко не всегда обеспечивает выход на заданные режимы полета. Однако требуемого решения можно достигнуть произведя нужною балансировку свободных коэффициентов , что и было сделано в данном случае. Компромиссное решение может оказаться полезным в условиях неопределенности дальнейших действий ЛА, так как вывод ЛА из разворота на предельных режимах может создать неблагоприятные условия для дальнейшего маневрирования.
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ:
1) Кабанов С.А. Оптимизация динамики систем при действии возмущений . М: ФИЗМАТЛИТ, 2008
2) Кабанов С.А. Управление системами на прогнозирующих моделях. СПб: Издательство С-Петербургского университета, 1997
3)Е.М. Воронов Методы оптимизации управления многообъектными многокритериальными системами на основе стабильно-эффективных угровых решений. М: Издательство МГТУ им. Баумана, 2001
4)Кабанов С.А. прикладные задачи оптимального управления . СПб: БГТУ , 2007
5)Бородавкин В.А. Зверев А.И. Кабанов С.А. Санников В.А. Шалыгин А.С Траектории. Аэродинамика. Характеристики летательных аппаратов. СПб: БГТУ , 1989
6) Лебедев А.А. Чернобровкин Л.С. Динамика полета М: Машиностроение , 1973
ПриложениеА - Исходный код программы реализующей алгоритм с прогнозирующей моделью
t0=0
tf=10
dt=0.1
g=9.8;
v=288;
Mw=-1.8
Md=-22.4
k=0.00001;
%%
fzad=1.56;
fi(1)=0;
gamma(1)=0;
omega(1)=0;
delta(1)=0;
u(1)=0;
t=[t0:dt:tf];
%%
ro1=100;
ro2=1000;
ro3=0.01;
ro4=0.1;
%%
qfi(1)=0;
qgamma(1)=0;
qomega(1)=0;
qdelta(1)=0;
qu(1)=0;
qx(1)=0;
qz(1)=0;
tt(1)=0;
rt(1)=1;
j=1;
for t_now=1:length(t)
fi(t_now)=qfi(t_now);
gamma(t_now)=qgamma(t_now);
omega(t_now)=qomega(t_now);
delta(t_now)=qdelta(t_now);
for i=t_now:length(t)
fi(i+1)=fi(i)+dt*g/v*tan(gamma(i));
gamma(i+1)=gamma(i)+dt*omega(i);
omega(i+1)=omega(i)+dt*(Mw*omega(i)+Md*delta(i));
delta(i+1)=delta(i)+dt*u(i);
u(i+1)=u(i);
end;
p1(t_now)=ro2*(fi(length(t))-fzad);
p2(t_now)=ro1*gamma(length(t));
p3(t_now)=ro3*omega(length(t));
p4(t_now)=ro4*delta(length(t));
pp1=p1;
pp2=p2;
pp3=p3;
pp4=p4;
for i=t_now:length(t)
fi(i+1)=fi(length(t)-i+1)-dt*g/v*tan(gamma(i));
gamma(i+1)=gamma(length(t)-i+1)-dt*omega(i);
omega(i+1)=omega(length(t)-i+1)-dt*(Mw*omega(i)+Md*delta(i));
delta(i+1)=delta(length(t)-i+1)-dt*u(i);
p1(i+1)=p1(i);
p2(i+1)=p2(i)-dt*(-p1(i)*g/(v*cos(gamma(i))*cos(gamma(i))));
p3(i+1)=p3(i)-dt*(-p2(i)-p3(i)*Mw);
p4(i+1)=p4(i)-dt*(-p3(i)*Md);
end;
UU=-k*p4(length(t));
qu(t_now)=UU;
qfi(t_now+1)=qfi(t_now)+dt*g/v*tan(qgamma(t_now));
qgamma(t_now+1)=qgamma(t_now)+dt*qomega(t_now);
if qgamma(t_now+1)>1.5
qgamma(t_now+1)=1.5;
end;
qomega(t_now+1)=qomega(t_now)+dt*(Mw*qomega(t_now)+Md*qdelta(t_now));
if qomega(t_now+1)>1.45
qomega(t_now+1)=1.45;
end;
qdelta(t_now+1)=qdelta(t_now)+dt*qu(t_now);
qu(t_now+1)=qu(t_now);
qx(t_now+1)=qx(t_now)+dt*v*cos(qfi(t_now+1));
qz(t_now+1)=qz(t_now)+dt*v*sin(qfi(t_now+1));
W=-0.000001*p1(t_now)*g/v*tan(qgamma(t_now))+p2(t_now)*qomega(t_now)+p3(t_now)*(Mw*omega(t_now)+Md*delta(t_now));
tt(t_now+1)=tt(t_now)+W;
end;
qwe=fix(100*tt(length(t)));
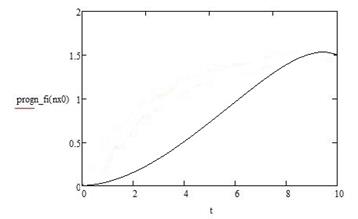
progn_fi=qfi
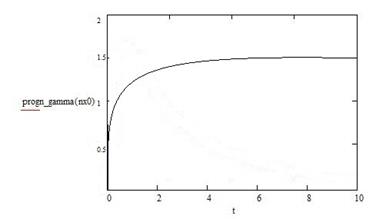
progn_gamma=qgamma
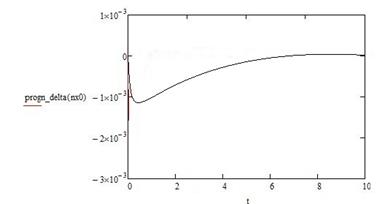
progn_delta=qdelta
progn_u=qu
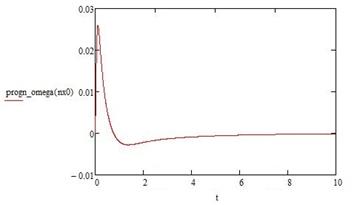
progn_omega=qomega
t=[t0:dt:tf+dt];
figure
plot(t, progn_fi);
figure
plot(t,progn_gamma);
figure
plot(t,progn_omega);
figure
plot(t, progn_delta);
figure
plot(t,progn_u);
%%
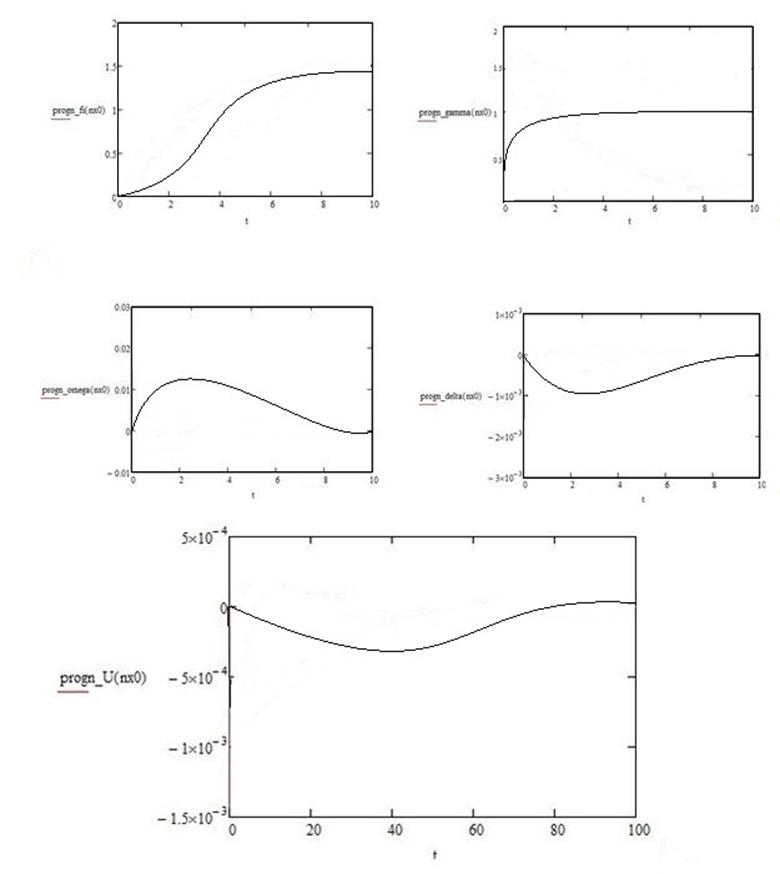
Приложение Б - Графики изменения исследуемых величин
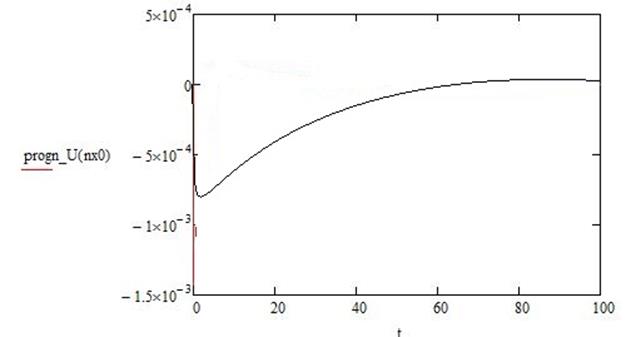
Приложение Б - Графики изменения исследуемых величин
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.