|
|
Для написания логических уравнений, соответствующих состояниям графа, необходимо определить его связанные переходы. Связанным переходам соответствуют логические переменные, определяемые как произведение логической переменной, назначенной данному состоянию, на логическое условие выхода из этого состояния. С учетом сказанного система логических уравнений для связанных переходов графа принимает следующий вид:
|
|
|
|
Логическое уравнение для переменной i -гo состояния имеет вид
![]()
ITRij - связанный переход, входящий в данное состояние ST,;
OTRik - связанный переход, выходящий из данного состояния ST.
Для рассматриваемого примера получим следующую систему логических уравнений:
|
|
Шаг 5. Написание логических уравнений для выходов системы управления.
Система уравнений имеет следующий вид.
Работа привода на подъем:
Up = ST-, + ST2 + ST6 + ST7 + ST10.
Работа привода на опускание: Down = ST4 + ST5 + ST9.
Работа привода в режиме торможения: Tormoz = ST2 + ST5 + ST7.
Установка и сброс бита М5.3: Set = ST8; Reset = ST0.
Вывод цифр:
«1» = ST0; «2» = ST3 + ST9 + ST10; «3» = ST8.
Шаг 6. Назначение адресов переменным (выполняется редактированием файла конфигурации).

цифры указателя этажа -» QB1;
привод движения вверх (Up) -» Q0.0;
привод движения вниз (Down) -» Q0.1;
торможение (Tormoz) -» Q0.2;
TRi-TR13^ M10.1-M11.5;ST0-STio- M20.0 - М21.2.
|
|
![]()
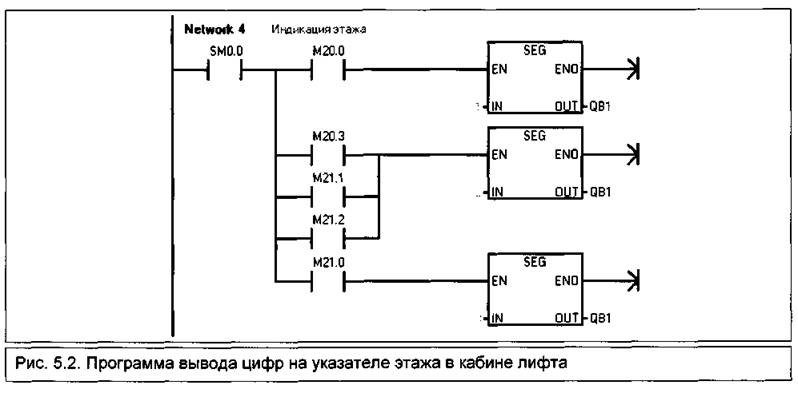
Полностью программа управления лифтом, реализующая заданный алгоритм работы, приведена на компакт-диске.
5.2. Решение задания для модели «Электродвигатель»
Вариант 1
Классический вариант переключения обмоток электродвигателя при его пуске. Задачу решают в следующем порядке.
Шаг 1. Определение режимов работы электродвигателя.
Для программирования ПЛК необходимо составить логические уравнения, связывающие между собой состояния его выходов, к которым подключаются контакторы, и условия реализации режимов работы электродвигателя.
Режимы работы электродвигателя:
1. Исходное состояние - ожидание.
2. Пуск двигателя (независимо от направления вращения вала) с переключением схемы его включения со звезды на треугольник. Режим пуска электродвигателя является кратковременным (его длительность обычно не превышает 5... 10 с).
3. Вращение вала двигателя по часовой стрелке.
4. Вращение вала против часовой стрелки.
Реализация перечисленных режимов обеспечивается командными кнопками (SO - S2), контактами блокировок и реле времени К5 и тепловым реле Q1, как показано на рис. 5.3.
![]()
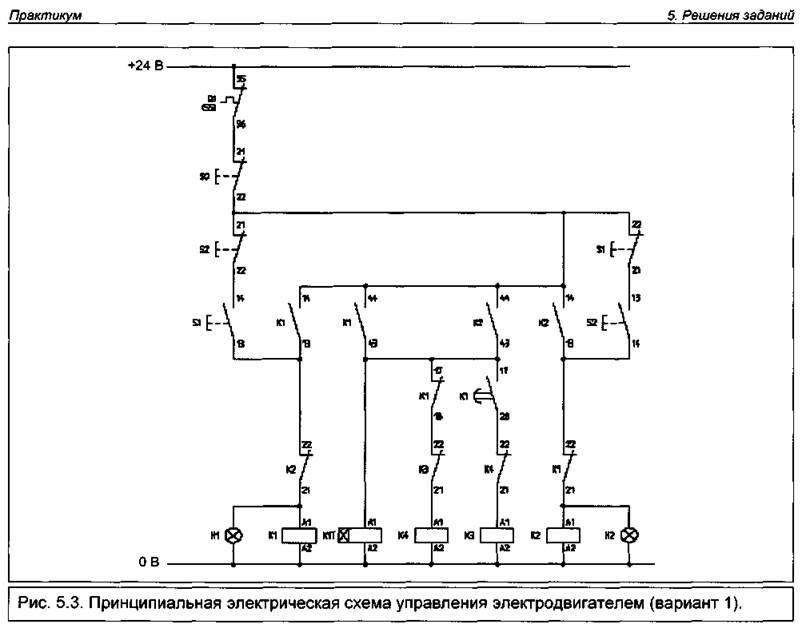
Здесь приняты следующие обозначения:
50 - кнопка выключения двигателя;
51 - кнопка «Пуск» включения вращения по часовой стрелке;
52 - кнопка «Пуск» включения вращения против часовой стрелки; Q1 - контакты теплового реле;
К1 - контактор включения вращения по часовой стрелке;
К2 - контактор включения вращения против часовой стрелки;
КЗ - контактор треугольника;
К4 - контактор звезды;
К5 - реле времени;
Н1 -сигнальная лампа индикации вращения по часовой стрелке;
Н2 - сигнальная лампа индикации вращения против часовой стрелки.
Шаг 2. Построение схемы подключения контроллера.
При использовании программируемого логического контроллера для управления включением электродвигателя к входам ПЛК подключаются контакты командных кнопок SO - S2 и контакты теплового реле Q1 (моделируемого в имитаторе COSIM отдельной кнопкой S5), а к выходам ПЛК -обмотки контакторов К1 - К4 (реле времени реализуется программно в самом контроллере). Контакторы представляют собой электромагнитные реле с контактной системой, предназначенной для коммутации силовых цепей. То есть при программном управлении электродвигателем его обмотки непосредственно к выходам контроллера обычно не подключают.
Меры безопасности при использовании ПЛК должны предотвращать возникновение аварийной ситуации, например, при сбое в его работе. Поэтому в системе управления необходимо применять дополнительные меры блокировки. В частности, это необходимо делать для предотвращения реализации взаимно исключающих функций (вращение по часовой стрелке и против часовой стрелки,
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.