




МЕТОДЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ
Для измерения дальности до отражающих объектов используют три метода: импульсный, частотный и фазовый. В основе всех трех методов лежат явления, обусловленные конечной скоростью распространения радиоволн в пространстве. Вследствие ряда преимуществ наибольшее распространение в радиолокации получил импульсный метод измерения дальности.
ИМПУЛЬСНЫЙ МЕТОД ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ
Определение дальности в импульсных дальномерах сводится к измерению времени запаздывания отраженного от цели импульса относительно зондирующего, так как
 |
Это основное соотношение для радиодальнометрии. Запаздыванию t3 = 1 мксек соответствует дальность R=150м. Чтобы получить высокую точность определения R, нужно точно измерять tз. Структура импульсного дальномера представлена на рис. 3.1, а соответствующие ей временные диаграммы — на рис. 3.2.
Отраженные сигналы в простейшем случае, когда целью является одиночный объект малых размеров, представляют собой высокочастотные импульсы весьма малой интенсивности приблизительно той же длительности, что и излучаемые импульсы.
Импульсный радиолокатор состоит из синхронизатора, передатчика, приемника и оконечного устройства.
Оконечное устройство является весьма важным элементом РЛС. В оконечное устройство, в общем случае, входит также система измерения угловых координат, связанная с антенной синхронной передачей угла поворота антенны. Оконечное устройство должно решать две задачи: во-первых, выделять сигнал на фоне помех с сохранением всех полезных параметров и, во-вторых, по параметрам выделенного сигнала измерять координаты цели и характеристики ее движения. В зависимости от получателя радиолокационной информации могут быть использованы различные типы оконечных устройств.
Если получателем радиолокационной информации является оператор, то оконечным устройством современной РЛС, как правило, служит электронно-лучевой индикатор или жидкокристаллический дисплей. Здесь радиолокационные сигналы преобразуются в видимое на экране изображение.
Если получателем радиолокационной информации является, вычислительное устройство или непосредственно исполнительный механизм непрерывного действия, то оконечным устройством РЛС должна быть система автоматического сопровождения цели. Последняя выдает данные о дальности цели обычно в виде напряжения, а данные об угловых координатах — в виде углов поворота осей антенны.
Если информация с РЛС поступает на ЦВМ, ее необходимо подавать в виде чисел двоичного кода. Оконечное устройство, обеспечивающее преобразование радиолокационной информации в двоичный код, получило название устройства инструментального съема данных.
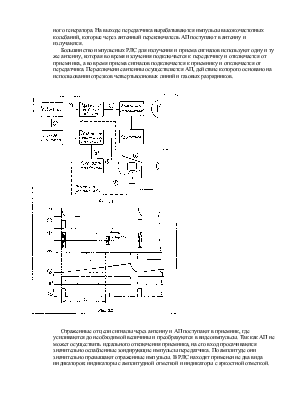
Рассмотрим работу импульсного дальномера, в качестве оконечного устройства которого используется электроннолучевой индикатор. Синхронизатор вырабатывает управляющие импульсы, следующие с определенной частотой повторения, с помощью которых координируется во времени работа всех элементов РЛС. Импульсы синхронизатора запускают передатчик, который состоит из модулятора и высокочастотного генератора. На выходе передатчика вырабатываются импульсы высокочастотных колебаний, которые через антенный переключатель АП поступают в антенну и излучаются.
Большинство импульсных РЛС для излучения и приема сигналов используют одну и ту же антенну, которая во время излучения подключается к передатчику и отключается от приемника, а во время приема сигналов подключается к приемнику и отключается от передатчика. Переключение антенны осуществляется АП, действие которого основано на использовании отрезков четвертьволновых линий и газовых разрядников.
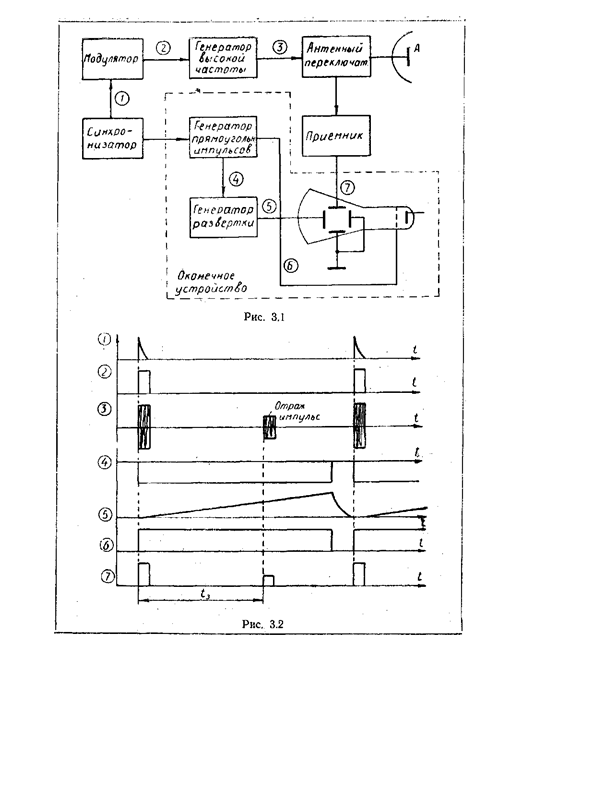
Отраженные от цели сигналы через антенну и АП поступают в приемник, где усиливаются до необходимой величины и преобразуются в видеоимпульсы. Так как АП не может осуществить идеального отключения приемника, на его вход просачиваются значительно ослабленные зондирующие импульсы передатчика. По амплитуде они значительно превышают отраженные импульсы. В РЛС находят применение два вида индикаторов: индикаторы с амплитудной отметкой и индикаторы с яркостной отметкой.
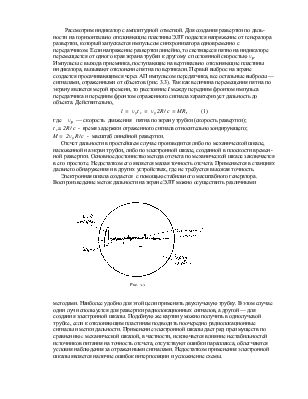
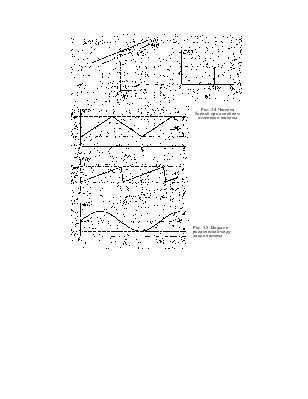
Рассмотрим индикатор с амплитудной отметкой. Для создания развертки по дальности на горизонтально отклоняющие пластины ЭЛТ подается напряжение от генератора развертки, который запускается импульсом синхронизатора одновременно с передатчиком. Если напряжение развертки линейно, то светящееся пятно на индикаторе перемещается от одного края экрана трубки к другому с постоянной скоростью vр. Импульсы с выхода приемника, поступающие на вертикально отклоняющие пластины индикатора, вызывают отклонение пятна по вертикали. Первый выброс на экране создается просачивающимся через АП импульсом передатчика, все остальные выбросы — сигналами, отраженными от объектов (рис. 3.3). Так как величина перемещения пятна по экрану является мерой времени, то расстояние l между передним фронтом импульса передатчика и передним фронтом отраженного сигнала характеризует дальность до объекта. Действительно,
l = vptз = vp2R/c =MR, (1)
где vр — скорость движения пятна по экрану трубки (скорость развертки);
tз= 2R/c - время задержки отраженного сигнала относительно зондирующего;
M= 2vpR/c - масштаб линейной развертки.
Отсчет дальности в простейшем случае производится либо по механической шкале, наложенной на экран трубки, либо по электронной шкале, созданной в плоскости временной развертки. Основное достоинство метода отсчета по механической шкале заключается в его простоте. Недостатком его является малая точность отсчета. Применяется в станциях дальнего обнаружения и в других устройствах, где не требуется высокая точность.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.