




1 ОСОБЕННОСТИ ПОСТРОЕНИЯ УСТРОЙСТВ СДЦ
1.1 Виды пассивных помех и средства их подавления
При работе современных радиолокационных станций управления воздушным движением различного назначения полезный радиолокационный сигнал, несущий информацию об объекте наблюдения, принимается РЛС вместе с различными помехами. Наиболее распространенным видом помех для РЛС УВД являются пассивные помехи, к которым можно отнести:
- отражения от земной поверхности и наземных местных предметов;
- отражения от гидрометеоров (облаков, дождя, снега, тумана);
- помехи, создаваемые дипольными отражателями;
- спорадические отражения, так называемые "ангелы", к которым относятся отражения от птичьих стай и неоднородностей воздушных масс.
В большинстве случаев мощность пассивных помех превышает мощность полезных сигналов. Например, помехи от дождя интенсивностью 15 мм/ч примерно на 13 дБ превышают интенсивность отражений от цели с эффективной поверхностью рассеяния 1 м2, находящейся на расстоянии 48 км от РЛС. Уровень помех от земной поверхности и местных предметов на 30-80 дБ может превышать уровень собственных шумов приемного устройства РЛС, что значительно превышает уровень полезного сигнала и приводит к его потере. Таким образом, наличие пассивных помех ухудшает, а в ряде случаев делает невозможным, наблюдение за воздушными объектами.
Известные в настоящее время методы подавления пассивных помех используют определенные отличия сигналов от целей и помех, к числу которых можно отнести:
- распределенный характер пассивных помех и точечный характер цели;
- поляризационные характеристики;
- скорость перемещения.
Улучшение качества радиолокационного наблюдения на фоне пассивных помех достигается, главным образом, за счет применения устройств селекции движущихся целей, которые используют различия скоростей перемещения целей и помех, что приводит соответственно к различным доплеровским сдвигам частоты сигнала цели и помехи, определяемым известным соотношением
fD = 2fоV/c = 2V/l, (1.1)
где V - радиальная составляющая скорости цели (помехи);
с - скорость света;
fо - частота несущих колебаний, излучаемых передатчиком РЛС;
l - длина волны РЛС.
Этот сдвиг частоты весьма незначителен по сравнению c несущей частотой fo сигнала, что можно продемонстрировать на числовом примере: при частоте передатчика РЛС 3 ГГц и радиальной скорости цели 250 м/с (крейсерская скорость современного самолета) fD = 5 кГц, а относительное изменение частоты составляет всего ~ 1,7х10-6. Из-за наличия такого незначительного изменения несущей частоты оказывается невозможным осуществить разделение спектров сигнала цели и помехи в исходной частотной области с помощью фильтров, известных к настоящему времени.
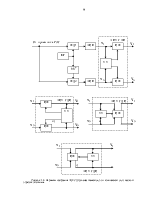
Выходом из этого положения является когерентное преобразование несущих колебаний отраженных сигналов в более низкий частотный диапазон. При этом абсолютная величина доплеровского сдвига частоты остается неизменной и в низкочастотном диапазоне. На практике наибольшее распространение получило когерентное преобразование радиолокационных сигналов в диапазон видеочастот. С этой целью может использоваться устройство (рисунок 1.1), состоящее из двух фазовых детекторов (ФД) с общим когерентным гетеродином (КГ), частота которого fг совпадает с промежуточной частотой приёмного устройства РЛС. Отметим, что преобразование сигналов по схеме, приведенной на рисунке 1.1, применяется при оптимальной обработке видеочастотного сигнала с неизвестной фазой на фоне небелого шума, что соответствует оптимальной фильтрации сигнала от цели на фоне пассивных помех в устройстве СДЦ.
 |
|||
 |
|||
![]()
![]()

![]()
![]()
![]()
![]()
![]()
![]()
![]() Рисунок 1.1 - Выделение квадратурных составляющих комплексного
сигнала
Рисунок 1.1 - Выделение квадратурных составляющих комплексного
сигнала
 |
|||||||||||
 |
|||||||||||
 |
|||||||||||
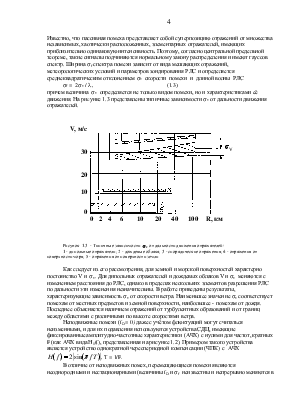
Рисунок 1.2 - Спектры сигнала цели Sц(f), неподвижных Sп1(f) и перемещающихся Sп2(f) пассивных помех и АЧХ H1(f) и H2(f) устройств СДЦ
Сигнал, поступающий с приемника РЛС на входы ФД, в общем виде можно представить выражением
a(t) = A(t) cos [2p (fг![]() fD) t + q0], где А(t) -
огибающая, содержащая информацию об изменении амплитуд отраженных сигналов;
fD) t + q0], где А(t) -
огибающая, содержащая информацию об изменении амплитуд отраженных сигналов;
q0 - начальная фаза.
Знак "плюс" в выражении для a(t) перед fD соответствует приближению объекта к РЛС, а знак "минус" - удалению.
Избирательная цепь на выходе каждого из ФД представляет собой фильтр нижних частот, полоса пропускания которого предполагается достаточной для воспроизведения спектра огибающей A(t). В ФД осуществляется линейное преобразование частоты, в результате которого колебание на выходе ФД1 принимает вид
AI(t) = k0A(t) cos
(![]() 2pfDt
+ q0), а на выходе
ФД2
2pfDt
+ q0), а на выходе
ФД2
AQ(t) = k0A(t) sin (![]() 2pfDt + q0), где k0
- коэффициент преобразования.
2pfDt + q0), где k0
- коэффициент преобразования.
Совокупность колебаний AI(t) и AQ(t), записанная в виде
суммы ![]() , позволяет трактовать
, позволяет трактовать ![]() как комплексную огибающую сигнала a(t).
Найдем спектральную плотность
как комплексную огибающую сигнала a(t).
Найдем спектральную плотность ![]() комплексной огибающей
комплексной огибающей ![]() . Используя преобразование Фурье и его
свойства,
. Используя преобразование Фурье и его
свойства, ![]() можно записать через выражение
можно записать через выражение
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.