Лабораторная работа №1.
Структурный анализ рычажного механизма.
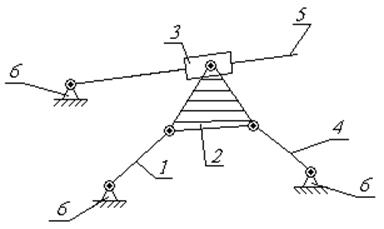
На рисунке 1 представлена кинематическая схема кривошипно-ползунного механизм с остановками ведомого колеса.
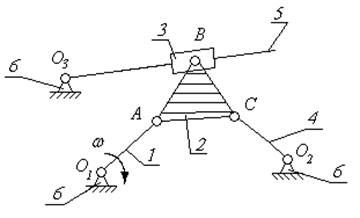
1 – кривошип;
2 – шатун;
3 – ползун;
4 – коромысло;
5 – кулиса;
6 – стойка.
В этом
механизме подвижных звеньев всего пять, ![]() .
Структурные формулы КП:
.
Структурные формулы КП:
[1-6]B1; [1-2]B1; [2-3]B1; [2-4]B1;
[4-6]B1; [3-5]П1; [5-6]B1.
В данном
механизме число одноподвижных КП ![]() ; число двух подвижных
КП
; число двух подвижных
КП ![]() . Определяем степень подвижности механизма
по формуле Чебышева:
. Определяем степень подвижности механизма
по формуле Чебышева:
![]() .
.
Следовательно, в механизме имеется одна начальная группа.
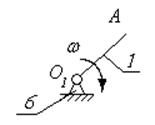
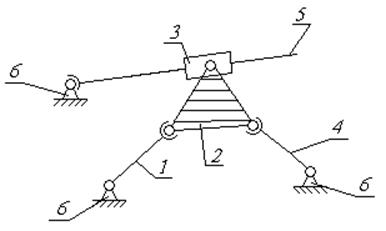
Раскладываем механизм на группы Ассура. Отделяем группу начальных звеньев, состоящую из стойки 6 и кривошипа 1 с КП [1-6]В1 (рисунок 2).
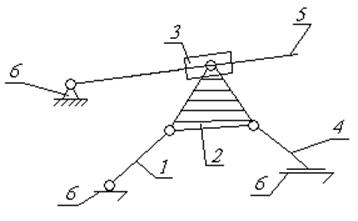
Изображаем оставшуюся часть КЦ (рисунок 3).
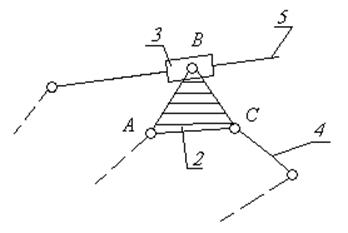
В эту КЦ
входят четыре звена и шесть КП: [1-2]B1; [2-3]B1; [2-4]B1; [3-5]П1; [4-6]B1; [5-6]B1. Значит, ![]() . Проверяем, является ли данная КЦ группой
Ассура. Используя условие
. Проверяем, является ли данная КЦ группой
Ассура. Используя условие  , получаем тождество 6
= 6. Значит, это группа нулевой подвижности; ее присоединение к ГНЗ не
изменяет подвижность механизма.
, получаем тождество 6
= 6. Значит, это группа нулевой подвижности; ее присоединение к ГНЗ не
изменяет подвижность механизма.
ВЫВОД: Данная группа, имея три свободных поводка, является группой III класса. Механизм в целом есть механизм III класса.
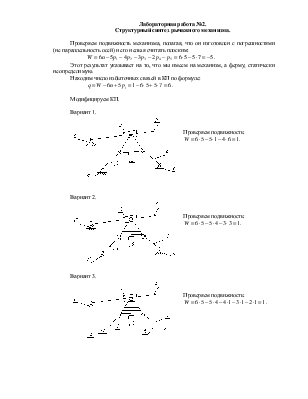
Лабораторная работа №2.
Структурный синтез рычажного механизма.
Проверяем подвижность механизма, полагая, что он изготовлен с погрешностями (не параллельность осей) и его нельзя считать плоским:
![]() .
.
Этот результат указывает на то, что мы имеем на механизм, а ферму, статически неопределимую.
Находим число избыточных связей в КП по формуле:
![]() .
.
Модифицируем КП.
Вариант 1.
Проверяем подвижность:
![]() .
.
Вариант 2.
Проверяем подвижность:
![]() .
.
Вариант 3.
Проверяем подвижность:
![]() .
.
Список использованных источников
1. Теория механизмов и механики машин: Лабораторный практикум / Р. Ф. Кребель, Д. М. Мехонцева, Е. Г. Синенко и др.; Под ред. Р. Ф. Кребеля. Красноярск: ИПЦ КГТУ, 2001. 102с.
2. Прикладная механика: для студентов втузов / Г. Б. Иосилевич, П. А. Лебедев, В. С. Стреляев. – М.:
Машиностроение, 1985.- 576с., ил.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.