является кратным 10 мм, а фиксирующие воротки размещены так, чтобы при помощи кольцевых углублений их можно было бы фиксировать в нужном положении.
Нижний кронштейн 5 вместе с фотоэлектрическим датчиком можно перемещать вдоль колонки 3 и фиксировать в произвольно выбранном положении.
Расчетные формулы:
 (1)
(1)
где t – измеренное время,
n – число колебаний,
T – период колебаний.
 (2)
(2)
где g – ускорение свободного падения,
T – период колебаний,
L(для математического маятника) – расстояние от конца оборотного маятника до опорной призмы ,
L(для оборотного маятника) - расстояние между опорными призмами.
Формулы для расчёта погрешностей.
(3)
где εмин. – минимальная относительная погрешность прямых измерений;
Dxmin – абсолютная минимальная погрешность прямых измерений;
x1 –результат первого наблюдения.
(4)
![]()
где Dxmin – абсолютная минимальная погрешность прямых измерений;
Dxприб. – приборная погрешность;
Dxокруг. – погрешность округлений.
(5)
где Dxприб. – приборная погрешность;
δ – предельная приборная погрешность (равняется 1см – для линейки в опыте №1 и 1 мм – в опыте №2, 1*10-4 с – для миллисекундомера).
(6)
где Dxокруг. – погрешность округлений;
p = 0,95 – доверительная вероятность;
h – интервал округления (равняется 1см – для линейки в опыте №1 и 1 мм – в опыте №2, 1*10-4 с – для миллисекундомера).
(7)
где Dxслуч. – случайная погрешность прямых измерений;
tn,p = 2,26 – коэффициент Стьюдента, при n=10 и p=0,95;
n – количечтво экспериментов;
Dxi – отклонение данного результата от среднего (![]() ).
).
(8)
где ε – относительная погрешность косвенных измерений;
Dy – абсолютная погрешность косвенных измерений;
<y> – среднее значение результатов наблюдения.
(9)
где Dy – абсолютная погрешность косвенных измерений;
![]() – абсолютная погрешность прямых
измерений;
– абсолютная погрешность прямых
измерений;
y1 – результаты первого наблюдения.
После подстановки соответствующих значений x и y получили следующие формулы для определения минимальной и полной погрешностей измерения величины g:
 (10)
(10)
 (11)
(11)
Формулы для расчета величин по методу наименьших квадратов:
 (12)
(12)
 (13)
(13)
Dac = 3sa (14)
ea,c = Dac/a 100 %. (15)
В нашем случае принимаем, что y = L, x = T2/4p и соответственно в результате получаем a = g.
Предварительная оценка погрешностей.
Опыт 1:
а) 

![]()
L = 0,32 м

б) 

![]()

в) 
Опыт 2:
а) 

![]()
б)
![]()

в) 
Выполнение работы:
Опыт 1:
а)Результаты измерений и расчетов ускорения свободного падения с помощью оборотного маятника:
Таблица 1
|
d, см |
n |
tпрям., с |
Tпрям. |
tперев., с |
Tперев. |
|
1 |
10 |
- |
- |
16,723 |
1,672 |
|
2 |
10 |
11,912 |
1,1912 |
15,319 |
1,533 |
|
3 |
10 |
11,803 |
1,1803 |
14,213 |
1,421 |
|
4 |
10 |
11,684 |
1,1684 |
13,325 |
1,333 |
|
5 |
10 |
11,539 |
1,1539 |
12,567 |
1,257 |
|
6 |
10 |
11,417 |
1,1417 |
11,923 |
1,192 |
|
7 |
10 |
11,279 |
1,1279 |
11,322 |
1,132 |
|
8 |
10 |
11,160 |
1,1160 |
10,832 |
1,083 |
|
9 |
10 |
11,037 |
1,1037 |
10,370 |
1,037 |
|
10 |
10 |
10,979 |
1,0979 |
9,9910 |
0,999 |
. б)Результаты измерений периодов колебаний оборотного маятника в прямом и перевернутом положениях при расстоянии (d) опорных призм от концов маятника, равном 8см.
Таблица 2
|
n |
tпрям.,с |
Tпрям.,с |
tперев.,с |
Tперев,с |
|
10 |
11,293 |
1,129 |
11,279 |
1,128 |
|
10 |
11,294 |
1,129 |
11,281 |
1,128 |
|
10 |
11,289 |
1,129 |
11,287 |
1,129 |
|
10 |
11,287 |
1,129 |
11,290 |
1,129 |
|
10 |
11,290 |
1,129 |
11,290 |
1,129 |
Контрольные расчеты:
![]() <T>=
<T>=
Расчет погрешностей:

Опыт 2:
Результаты измерений и расчетов ускорения свободного падения с помощью математического маятника:
Таблица 3
|
n |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|
L, м |
0,44 |
0,43 |
0,42 |
0,41 |
0,40 |
0,39 |
0,38 |
0,37 |
0,36 |
0,35 |
|
t, с |
13,35 |
13,19 |
13,06 |
13,01 |
12,79 |
12,60 |
12,39 |
12,28 |
12,22 |
12,02 |
|
T, с |
1,34 |
1,32 |
1,31 |
1,30 |
1,28 |
1,26 |
1,24 |
1,23 |
1,22 |
1,20 |
|
T2, с2 |
1,78 |
1,74 |
1,70 |
1,69 |
1,64 |
1,59 |
1,54 |
1,51 |
1,49 |
1,44 |
|
g, м/с2 |
9,73 |
9,75 |
9,72 |
9,55 |
9,64 |
9,69 |
9,76 |
9,67 |
9,51 |
9,56 |
Контрольные расчеты:

Расчет ускорения свободного падения с использованием метода наименьших квадратов:
Таблица 4
|
N |
|
|
|
|
|
|
1 |
0,045 |
0,44 |
0,0198 |
0,00203 |
0,194 |
|
2 |
0,044 |
0,43 |
0,0189 |
0,00194 |
0,185 |
|
3 |
0,043 |
0,42 |
0,0181 |
0,00185 |
0,176 |
|
4 |
0,043 |
0,41 |
0,0176 |
0,00185 |
0,168 |
|
5 |
0,041 |
0,40 |
0,0164 |
0,00168 |
0,160 |
|
6 |
0,040 |
0,39 |
0,0156 |
0,00160 |
0,152 |
|
7 |
0,039 |
0,38 |
0,0148 |
0,00152 |
0,144 |
|
8 |
0,038 |
0,37 |
0,0141 |
0,00144 |
0,137 |
|
9 |
0,038 |
0,36 |
0,0137 |
0,00144 |
0,130 |
|
10 |
0,037 |
0,35 |
0,0130 |
0,00137 |
0,123 |
|
Сумма |
0,408 |
3,95 |
0,1619 |
0,01672 |
1,569 |
Оценка погрешности по методу наименьших квадратов:

![]() с=0,0748∙3=0,223(м∙с-2)
с=0,0748∙3=0,223(м∙с-2)
![]()
Графики:
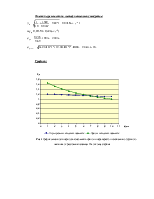
Рис 2 График зависимости периодов колебаний в прямом и перевернутом положениях оборотного маятника от расстояния чечевицы 12а от конца стержня
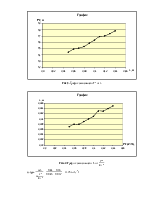
Рис.3. График зависимости T2 от L.
Рис.4
График зависимости L от ![]()
g=tgα=
Окончательный результат измерений
1)Для физического маятника:
![]() м/с2,
м/с2,![]() при р = 0,95.
при р = 0,95.
2)Для математического маятника:
![]() м/с2,
м/с2,![]() при р = 0,95.
при р = 0,95.
Вывод: В ходе выполнения лабораторной работы путем эксперимента на примере обратного и математического маятника определили ускорение свободного падения.
В первом опыте было необходимо, изменяя момент инерции (передвигая чечевицу), добиться того, чтобы расстояние между опорными призмами стало равным приведенной длине оборотного маятника. Для этого построили график зависимости периодов колебания в прямом и перевернутом положении от расстояния чечевицы от конца стержня. Точка пересечения данных графиков соответствовала равенству периодов этих колебания и соответственно была равно приведенной длине. В нашем случае данная точка соответствовала L=7. Повторили опыты для данного расстояния. По полученным результатам вычислили Т, а затем и g.
Во втором опыте проводили схожие измерения, но для математического маятника. Измерили t для n=10 при различной длине. Вычислили период колебания. Далее при помощи метода наименьших квадратов оценили <g> и случайную относительную погрешность. Метод наименьших квадратов использовался для получения более точных
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.