Конструктивно статор как у АД – выполняется в виде магнитной системы, представляющей из себя пустотелый цилиндр, выполненный из шихтоованной стали.
По ротору различают:
По основным свойствам 1-3 мало чем отличаются.
Реактивный ротор устанавливается в положение с минимальным магнитным сопротивлением ( min э/м энергией)
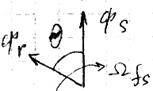
Поток статора двигателя всегда опережает поток ротора на
угол ![]() . Установившийся режим работы двигателя при
таком угле
. Установившийся режим работы двигателя при
таком угле ![]() , когда вращающий, тормозящий моменты
двигателя взаимно уравновешенны.
, когда вращающий, тормозящий моменты
двигателя взаимно уравновешенны.

![]() =180оС
– опрокидывание.
=180оС
– опрокидывание.
М - положительный и отрицательный => проблема пуска (вибрация ротора). Делают пусковую обмотку на роторе (асинхронный пуск).
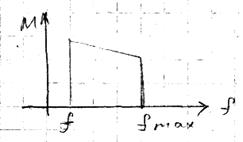
Us = kfпит.
Идеально жесткая механическая характеристика (частота постоянна).
Незаменимы в точных приборах. Все СД – колебательные звенья.
Активный ротор сейчас на постоянном магните (активный момент больше чем реактивный).
Постоянный магнит => ![]() ( в глубоком насыщении).
( в глубоком насыщении).
Обмотка статора при протекании по ней тока создает МДС, в результате возникает магнитное поле статора, которое является пульсирующим. Пульсирующие магнитные потоки, разложенные на симметричные составляющие, создают прямой поток, вращающийся синхронно с ротором => магнитные потоки ротора и статора относительно друг друга неподвижны. В отличие от первых двух гистерезисный ротор имеет следующую характеристику.

29. Принцип работы, конструкция и характеристики шаговых двигателей.
ШД – микродвигатели, преобразуют команду, заданную в виде импульса в фиксированный угол поворота вала без датчиков, обратных связей. Работают в комплекте с электронными коммутаторами (роль- переключение обмоток ШД и источника питания с последовательностью и частотой, соответствующей заданной команде). ШД вместе с коммутатором можно рассматривать как следящую систему, отрабатывающую заданный угол поворота вала либо как систему частотного управления.
В системе «ШД – коммутатор» регулирующий угол поворота строго соответствует числу переключений обмоток ШД, направление движения – порядок переключения обмоток, а угловая скорость соответствует частоте переключения питающего напряжения.
Статор ШД – магнитная система с явно выраженными полюсами, на которых располагаются обмотки.
Ротор – активного типа (постоянный магнит, пучковая обмотка на роторе отсутствует), реактивного типа (выполняется из мягкой электротехнической стали и имеет зубчатую структуру). Чаще используется активный на постоянных магнитах, т.к. больший момент. Малая частота коммутации, т.к. напряжение должно понижаться, иначе происходит перегревание обмоток.

Различают переходный и установившийся режимы работы. В установившемся режиме работы ротор двигателя вращается с некоторой скоростью, определяемой частотой поступающих импульсов; вращение сопровождается некоторыми колебаниями.
Переходный режим – пуск и торможение – тяжелый режим для двигателя. ШД – колебательное звено II порядка.
Преимущества: следящая система без ОС => не накапливается ошибка.
Недостаток: возможность пропуска импульса и потеря шага.
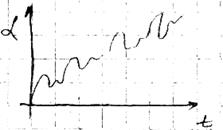
При некоторой частоте (постоянной) коммутации изменения углового положения вала двигателя выглядит следующим образом
30. ТГ постоянного тока – особенности конструкции, характеристики и основные погрешности.
ТГ представляет собой малогабаритную электрическую машину – генератор, ЭДС которой пропорциональна скорости вращения вала. ТГ – информационная машина постоянного тока. По конструкции аналогична ДПГ, но с целью улучшения точностных показателей и снижения пульсаций напряжения в этой машине увеличено число коллекторных пластин; выполняются дополнительные обработки ротора и статора. Сборку ротора осуществляют веерным способом. Ротор протачивают, чтобы его форма была как можно более цилиндрической.
![]()
![]() ,
,
ТГ – тахогенератор как датчик частоты вращения.
Для того, чтобы Етг мало менялось магнитный поток постоянный. Чаще всего ТГ с постоянными магнитами.
Статическая характеристика:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.