Соотношение ![]() и
и ![]() влияет на граничный режим, чем ближе
влияет на граничный режим, чем ближе ![]() и
и ![]() , тем
меньше зона прерывистых токов. =>
, тем
меньше зона прерывистых токов. => ![]() пытаются
оптимизировать. Если
пытаются
оптимизировать. Если ![]() большое, то увеличивается зона
прерывистых токов и нужно ставить дроссель (большие габариты и плохие
динамические показатели привода). Если
большое, то увеличивается зона
прерывистых токов и нужно ставить дроссель (большие габариты и плохие
динамические показатели привода). Если ![]() наоборот
мало, то потери при коммутации. Обычно
наоборот
мало, то потери при коммутации. Обычно ![]() .
.
Реверсивный широтно-импульсный преобразователь.
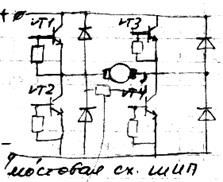
VT1,VT4 – момент положительный
VT3, VT2 – момент отрицательный
Все транзисторы сразу включать нельзя, будет короткое замыкание.
Коммутацию можно осуществлять двумя способами.
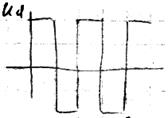
![]() =>
=> ![]() ; затормозить также можно используя
режим противовключения.
; затормозить также можно используя
режим противовключения.
VT1 постоянно включен, коммутируется VT4. При изменении VT1, VT4 на VT2, VT3 изменится знак => двигатель будет вращаться в другую сторону.

механические характеристики:
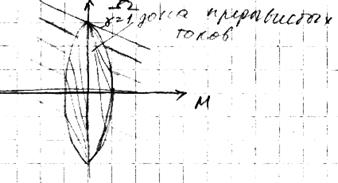
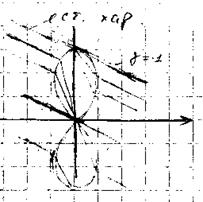
при одновременной коммутации зона прерывистого тока относительно велика и определяется:
Зона прерывистого тока уменьшается при разновременной коммутации.
17. Вращающееся магнитное поле – условия получения.
В основе работ машин переменного тока лежит принцип вращающегося магнитного поля. Частота вращения которого определяется частотой питающей сети и числом пар полюсов.
Для создания вращающегося магнитного поля необходимо по крайней мере:
· 2 обмотки сдвинутых в пространстве.
· необходимо запитать напряжением сдвинутым по фазе.
Желательно чтобы поле было круговым. Круговое поле имеет следующие свойства?
Круговое вращающееся магнитное поле получается только в случае:
В других случаях поле будет иметь другую форму ( электрическое поле можно рассматривать как два встречно вращающихся магнитных поля ).
18. Общая характеристика и принцип работы асинхронного двигателя.
Асинхронные машины делят на АДОН (общего назначения), ОАД (однофазные), АИД (исполнительные).
АДОН – преобразует электрическую энергию в механическую, при работе с постоянной частотой вращения.
ОАД – используется в вспомогательных цепях автоматики.
АИД – имеют специальные характеристики, которые позволяют регулировать частоту вращения в большом диапазоне частот.
Ротор выполняется из шихтованных пластин электротехнической стали, в которых есть пазы, в которые заливают алюминий и эти стержни на наружной поверхности замыкаются кольцом (беличья клетка) для уменьшения намагничивающего тока. Воздушный зазор между статором и ротором делают весьма малым.
Принцип работы АД.
Вращающееся магнитное поле в зазоре статора индуцирует ЭДС в обмотках ротора, т.к. обмотки ротора короткозамкнутые. ЭДС приводит к появлению переменного тока, который создает магнитный поток ротора, который взаимодействует с полем статора. В результате появляется электромагнитный момент.
Если ![]() , то ЭДС не наводится
=> тока нет => момента нет M=0. Во всех остальных
случаях
, то ЭДС не наводится
=> тока нет => момента нет M=0. Во всех остальных
случаях ![]() .
.
Относительную разность частот вращения называют скольжением:


19. Энергетическая диаграмма АД.
Мощность статора ![]() .
Часть уходит на потери в стали статора
.
Часть уходит на потери в стали статора ![]() и в
меди статора
и в
меди статора ![]() . Остальная мощность
. Остальная мощность ![]() идет на создание поля, часть которой на
потери в меди ротора
идет на создание поля, часть которой на
потери в меди ротора ![]() , на механические и добавочные
потери и на валу выделяется мощность
, на механические и добавочные
потери и на валу выделяется мощность ![]() .
.
![]()
![]()
![]()
![]()
![]() невелика по сравнению с другими
потерями, на частоте 50 Гц. Ею пренебрегаем.
невелика по сравнению с другими
потерями, на частоте 50 Гц. Ею пренебрегаем.
Потери ![]() связаны с трением на
начальном участке, ими мы тоже пренебрегаем.
связаны с трением на
начальном участке, ими мы тоже пренебрегаем.
Составим уравнения на основе диаграммы.
![]()
![]()
![]()
![]()
![]() =>
=> ![]() =>
=>
![]()

![]()
получим
20. Уравнения механической характеристики 3х фазного АД.
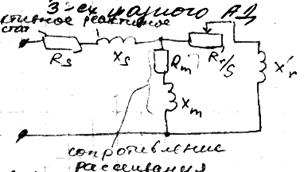
эквивалентная T образная схема
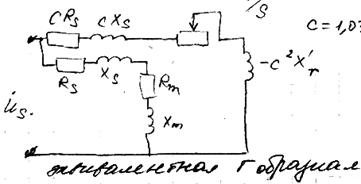
эквивалентная Г образная схема
На основании эквивалентных схем двигателя и скольжения можно определить приведенный ток ротора.
 .
.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.