Зная ток можно определить момент
 , где m –
число фаз.
, где m –
число фаз.
 , уравнение механической характеристики в неявном виде.
, уравнение механической характеристики в неявном виде.
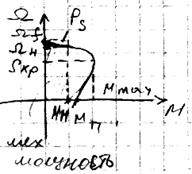
![]() определяет диапазон моментов
нагрузки. Если момент нагрузки большой, то выходим за
определяет диапазон моментов
нагрузки. Если момент нагрузки большой, то выходим за ![]() =>
двигатель остановится.
=>
двигатель остановится.
Чтобы определить ![]() , нужно найти
, нужно найти ![]() , соответствующее этому моменту.
, соответствующее этому моменту.
 , =>
, =>
“-“ – работа в генераторном режиме.
“+“ – работа в режиме двигателя.
 ,
,
p – число пар полюсов.
m - число фаз.
 ,
,
чем ближе эти площади – тем жестче характеристики, тем выше КПД.
21. Режимы работы АД.
Уравнение механической характеристики:
0<S<1 – двигательный режим
S>1 – режим противовключения.
S<0 – генераторный режим.
При режиме противовключения двигатель затормозится и начнет вращаться в другую сторону.
Генераторный режим – отдача энергии в сеть (рекуперация).
Переход в режим противовключения при переключении обмотки статора для другого направления вращения.
Динамическое торможение – обмотки статора запитываются постоянным током.
При этом постоянный ток, проходя по обмоткам статора, создает неподвижное магнитное поле в котором вращается ротор.
Схема включения при динамическом торможении:

22. Обзор методов управления частотой вращения АД.
Существует несколько способов регулирования частоты вращения.
, следовательно
![]() , значит жесткость характеристик
резко падает с понижением
, значит жесткость характеристик
резко падает с понижением ![]() .
.


существуют АД, обмотка статора
которых позволяет переключать ее образуя разное количество пар полюсов. В таких
случаях возможно СТУПЕНЧАТОЕ управление угловой скоростью путем переключения
обмотки статора под нагрузкой. Допустим двигатель работал с меньшим количеством
пар полюсов ![]() , имея синхронную скорость
, имея синхронную скорость ![]() , что соответствует точке A
характеристики. При переключении на число пар
, что соответствует точке A
характеристики. При переключении на число пар ![]() синхронная скорость двигателя
синхронная скорость двигателя  . Поэтому в момент переключения он перейдет
из состояния, соответствующего точке A в точку B и окажется в генераторном режиме работы. На участке
характеристики
. Поэтому в момент переключения он перейдет
из состояния, соответствующего точке A в точку B и окажется в генераторном режиме работы. На участке
характеристики ![]() происходит торможение
с отдачей энергии в сеть. Если момент сопротивления сохранился неизменным,
установится новая, примерно в два раза меньшая угловая скорость, определяемая
точкой C.
происходит торможение
с отдачей энергии в сеть. Если момент сопротивления сохранился неизменным,
установится новая, примерно в два раза меньшая угловая скорость, определяемая
точкой C.


23. Частотное управление АД.
Такой способ управления позволяет получить диапазрн
регулирования  без применения специальных мер
(обратные связи). Верхняя граница
без применения специальных мер
(обратные связи). Верхняя граница ![]() определяется
механической прочностью конструкции ротора и допустимым значением частоты
вращения подшипников, нижняя граница
определяется
механической прочностью конструкции ротора и допустимым значением частоты
вращения подшипников, нижняя граница ![]() определяется изменением
формы механической характеристики.
определяется изменением
формы механической характеристики.
 , учитывая, что x пропорционально
частоте источника, и пренебрегая
, учитывая, что x пропорционально
частоте источника, и пренебрегая ![]() (сопротивлением обмотки
статора), получим
(сопротивлением обмотки
статора), получим
 , где A –
коэффициент пропорциональности.
, где A –
коэффициент пропорциональности.
Это соотношение Костенко, которое определяет закон изменения напряжения при изменении частоты.
![]() , регулирование
с постоянным моментом.
, регулирование
с постоянным моментом.
![]()
т.к. характеристики жесткие, мы можем получить большой диапазон изменения частоты.
Меняется частота вращения поля.
Способ эффективный, но дорогой.
24. Особенности конструкции и характеристики однофазных АД.
Однофазные двигатели отличаются от 3х фазных тем, что на
статор помещена однофазная обмотка, занимающая ![]() статора.
ОАД не обладают пусковым моментом, поэтому на статоре предусматривают
вспомогательную обмотку ( пусковая обмотка, которая занимает
статора.
ОАД не обладают пусковым моментом, поэтому на статоре предусматривают
вспомогательную обмотку ( пусковая обмотка, которая занимает ![]() пазов статора) или другие пусковые
приспособления). Рабочая и пусковая обмотки смещены в пространстве на половину
полюсного деления или на 90 градусов.
пазов статора) или другие пусковые
приспособления). Рабочая и пусковая обмотки смещены в пространстве на половину
полюсного деления или на 90 градусов.
Роторы двигателей выполнены в виде беличей клетки.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.