`
Факультет автоматики и вычислительной техники
Кафедра автоматики
(ответы на контрольные вопросы к экзамену у Русакова Олега Петровича)
Упорно наколотили:
Андреев
Билык
Нск 2002
1. Конструкция и принцип работы машин постоянного тока.
ДПТ состоит из неподвижной части – статора и вращающейся – ротора. Статор - станина для крепления неподвижных хуй пойми что. 0К внутренней поверхности статора опять хуй пойми что, которые состоят из сердечников и обмоток возбуждения. Сердечники имеют хуевы наконечники, которые обеспечивают нужное распределение магнитной индукции в воздушном зазоре. Иногда вместо электромагнитов используют постоянные магниты. Ротор включает в себя якорь коллектор (для выпрямления тока). Якорь состоит из сердечника, набранного из листков электротехнической стали, покрытых лаком (для уменьшения вихревых токов). В изолированные пазы сердечника укладывают обмотку. Концы обмотки якоря присоединяют к изолированным медным пластинам коллектора. Внешнюю цепь присоединяют к коллектору посредством щёток, …. которые служат для съёма тока с коллектора. Принцип работы основан на законах электромагнитной индукции, законах Ампера и Фарадея. При помещении в магнитное поле проводника с током, он испытывает механическое воздействие (закон Ампера). Таким образом, машина должна иметь магнитную систему для создания магнитного поля и совокупность проводников, по которым протекает электрический ток. Магнитное поле создаётся электромагнитным путём, т.е. посредством обмоток возбуждения, находящейся на полюсах электромагнитной системы.
![]()
![]()
На основании з-на Фарадея:
![]()
где С – хуй пойми чего составляющая, постоянная якоря.
Согласно з-ну Ампера, возникает момент: ![]()
Момент приводит к движению, к появлению скорости:
Если момент двигателя превышает сопротивления, то двигатель будет ускоряться; если М = Мс, то ускорение = 0, скорость постоянная; если М<Mc, то двигатель будет тормозиться. При вращении индуцируется ЭДС, которая уменьшается по хуй пойми по какому закону. Чтобы увеличитьть ЭДС и уменьшить пульсации на якоре размещают много витков.
2. ДПТ независимого возбуждения, особенности конструкции, уравнения мех. регулировочные характеристики.
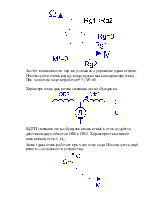
ДПТНВ состоит из статора и ротора. Уравнения механической характеристики:
![]() o – частота холостого хода, когда M = 0
o – частота холостого хода, когда M = 0
Искусственные характеристики имеют такой же наклон, как естественная (одинаковая жёсткость). Когда напряжение Uя не подаём, - это режим торможения, характеристика будет проходить через ноль. При положительном моменте режим двигателя, при отрицательном – генератора. На основе уравнения можно построить регулировочные хар-ки: (наклон у них тоже одинаковый)

обмотка возбуждения питается от сети, а напряжение Uя подаётся от хуй пойми какого источника напряжения. Изменяя Uя, можно управлять двигателем.
В режиме торможения (Uя = 0) добавляются нагрузочные сопротивления.
При этом механическая характеристика в зависимости от Rg будет менять вид:
т.е. будет изменяться наклон хар-ки. Наклон будет увеличиваться характеристики будут хуй пойми какими
3. ДПТ параллельного возбуждения. Особенности конструкции. Уравнения механич. и регулировоч. характеристики
Обмотка возбуждения включается параллельно обмотке якоря. Uв = Uя (питаем от одной сети)
Механические характеристики: ![]() = f (M), Uя
= const
= f (M), Uя
= const
Фв = k Iв Iв = Uв/Rв а т.к. Uя = Uв:

Менять скорость вращения можно изменяя Uя, Rя, Фв. Uя увеличивать больше U ном не рекомендуется, ->Uя уменьшают. При включении Rg в цепь якоря жёсткость снижается тем больше, чем больше сопротивление Rg. С уменьшением потока частота вращения двигателя возрастает. Регулировать скорость вращения с помощью Rп не экономично, т.к снижается КПД из-за потерь в Rg.
Регулировочные хар-ки: ![]() = f (Uя), при М = const
= f (Uя), при М = const
M = 0, 
![]() при Uя1 < Uя2,
при Uя1 < Uя2, ![]()
4. ДПТ последовательного и смешанного возбуждения. Особенности конструкции, уравнения мех и регулировочные хар-ки.
ДПТ последовательного возбуждения: обмотка возбуждения с небольшим числом витков включается последовательно в цепь якоря.
Фв = к Iв, Iв = Iя, Обязательно должна быть нагрузка, иначе большие значения частоты вращения -> разнос двигателя.
Механические характеристики: ![]() = f (M), Uя
= const
= f (M), Uя
= const
Магнитный поток при таком включении ОВ – не постоянный, а является функцией от тока. Таким образом при увеличении нагрузки на валу скорость двигателя изменяется в основном из-за изменения магнитного потока, а не за счёт увеличения падения напряжения в цепи якоря.
При малом насыщении магнитной системы, когда магнитный поток пропорционален току, вращающий момент пропорционален квадрату тока -> значительная крутизна механических характеристик, нелинейный их характер. При малых нагрузках, когда магнитная цепь не насыщена и
Фв = к Iв,
скоростная
характеристика ![]() = f (M)
при U=const имеет вид гиперболы. С увеличением нагрузки сталь
машины насыщается и хар-ка становиться более пологой. При больших нагрузках,
когда магнитный поток практически постоянен, характеристика приближается к
линейной. Скоростная хар-ка двигателя последовательного возбуждения является
мягкой. Чем больше Rg, тем мягче
хар-ка.
= f (M)
при U=const имеет вид гиперболы. С увеличением нагрузки сталь
машины насыщается и хар-ка становиться более пологой. При больших нагрузках,
когда магнитный поток практически постоянен, характеристика приближается к
линейной. Скоростная хар-ка двигателя последовательного возбуждения является
мягкой. Чем больше Rg, тем мягче
хар-ка.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.