Министерство образования и науки Российской Федерации
Федеральное агентство по образованию
Новосибирский Государственный Технический Университет
Кафедра Автоматики

Курсовая работа по курсу
«ТЕХНИЧЕСКИЕ СРЕДСТВА СИСТЕМ АВТОМАТИКИ И УПРАВЛЕНИЯ»:
Выбор двигателя постоянного тока для системы стабилизации скорости.
Факультет: АВТ
Группа: АА-27
Студент: Боймельштейн Ю.
Преподаватель: Русаков О.П.
Вариант: 15
Отметка о защите:
Содержание:
Стр.
Задание к проектированию............................................................................................. 3
Исходные данные……………………………………………………………………………3
1. Предварительный выбор двигателя........................................................................... 4
2. Построение диаграмм токов и моментов при пуске, торможении и установившемся движении......................................................................................... 6
3. Оценка тепловой нагрузки машины.......................................................................... 9
4. Выбор способа управления двигателем………………………………………………..10
5.Оценка динамических параметров двигателя и усилителя мощности………………..11
Заключение………………………………………………………………………………….14
Список литературы.................................................................................................................................... ….15
По заданной тахограмме и моменту нагрузки выбрать тип и мощность двигателя постоянного тока (ДПТ) для системы стабилизации скорости.
1. На основании тахограмм и момента нагрузки рассчитать среднеквадратичную мощность и сделать предварительный выбор двигателя. При необходимости применить редуктор (мультипликатор). При расчете КПД редуктора принять равным 75%.
2. Рассчитать и построить диаграммы токов и моментов при пуске, торможении и установившемся движении (принять момент пуска и торможения равным трем моментам нагрузки).
3. Выполнить проверку выбранного типа двигателя по теплу, используя метод эквивалентного тока или момента.
4. Выбрать и обосновать способ управления двигателем.
5. Разработать функциональную схему управления двигателем.
6. Выполнить оценку параметров динамической модели двигателя и усилителя мощности.
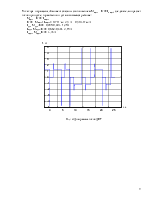
В пояснительной записке привести:
1. Графики частоты вращения, тока и момента двигателя.
2. Функциональную схему управления двигателем.
3. Динамическую модель двигателя с параметрами.
ИСХОДНЫЕ ДАННЫЕ
NL-15
Таблица 1.Текущая частота вращения двигателя Wi и длительность интервала работы tиi двигателя при частоте вращения Wi
|
N |
W1 |
W2 |
W3 |
W4 |
W5 |
W6 |
W7 |
|
1 |
50 |
100 |
150 |
-100 |
-50 |
50 |
-100 |
|
L |
tи1 |
tи2 |
tи3 |
tи4 |
tи5 |
tи6 |
tи7 |
|
5 |
2 |
3 |
2 |
3 |
2 |
3 |
2 |
Длительность паузы в работе двигателя равна для N - нечетных - tп =1,5 сек.
Момент нагрузки –момент сухого трения Мнаг=35 Н*см=0.35Н*м.
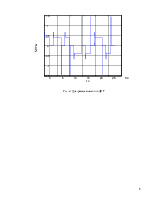
Тахограмма показана на рис. 1.
рис.1
Общее время работы двигателя:
 .
.
Максимальная скорость вращения:
 .
.
Рассчитаем среднеквадратичную мощность двигателя:
Е = К·Ф·W
Мнаг = К·Ф·Iя

Р = Е·Iя = Мнаг·W
![]()
|
P1 |
P2 |
P3 |
P4 |
P5 |
P6 |
P7 |
|
17.5 |
35 |
52.5 |
35 |
17.5 |
17.5 |
35 |
 Вт
Вт
![]() .
.
Необходимо выбрать двигатель, удовлетворяющий условиям:
![]()
- среднеквадратичная мощность двигателя не должна быть больше номинальной;
- нагрузочный момент не должен быть больше номинального;
- заданный тормозящий (пусковой) момент не должен превышать пусковой момент двигателя, определенный производителем.
Выбираем двигатель постоянного тока СЛ-621.
Таблица 2.Основные технические данные двигателя постоянного тока серии СЛ-621
|
Номинальное напряжение, В |
110 |
|
Номинальная мощность, Вт |
172 |
|
Номинальный ток возбуждения, А |
0.16 |
|
Номинальный ток якоря, А |
2.3 |
|
Номинальная частота вращения, об/мин |
2400 |
|
Номинальный вращающий момент, Н*м |
0.7 |
|
Момент инерции якоря, кг*см2 |
6.75 |
|
Пусковой момент, Н*м |
1.25 |
|
Статический момент трения, Н*м |
0.038 |
|
Сопротивление обмотки возбуждения, Ом |
560 |
|
Сопротивление обмотки якоря, Ом |
3 |
|
Коэффициент самоиндукции якоря |
35 |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.