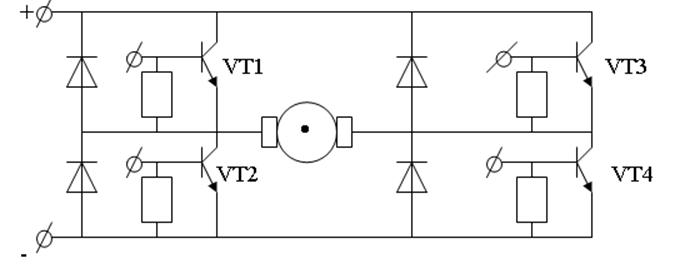
Несимметричное управление (рис. 4в) получают при постоянно открытом ключе, например ТК1(VT1), и постоянно закрытом другом ключе ТК2(VT2), последовательно подключенных к источнику питания. Два других ключа переключаются в противофазе. Тогда на якоре двигателя формируется однополярные импульсы напряжения Uя. Изменение полярности импульсов напряжения на якоре достигается при постоянно открытом ключе ТК3(VT3) и постоянно закрытом ключе ТК4(VT4). Недостатком несимметричного управления является наличие зоны нечувствительности при γ→0 и большая токовая нагрузка верхних ключей в схеме.
Последний недостаток исключается в схеме с поочередным управлением ключами (рис. 4г). Здесь в состоянии переключения в течении двух периодов находятся все четыре транзисторных ключа. Причем два диагонально расположенных ключа, например ТК1(VT1) и ТК4(VT4), имеют длительность открытого состояния (1+ γ)Т, а два других – (1- γ)Т. Однако моменты открывания каждого из диагонально расположенных ключей сдвинуты на период выходного напряжения. Поэтому однополярное выходное напряжение состоит из импульсов продолжительности γТ.
5.РАСЧЁТ ПАРАМЕТРОВ ПЕРЕДАТОЧНОЙ ФУНКЦИИ ДВИГАТЕЛЯ
 .
.
 ,
,
 ,
,
 ,
,
 ,
,
 ,
,  , передаточная функция двигателя
, передаточная функция двигателя
 , которая после соответствующих
преобразований представляет собой
, которая после соответствующих
преобразований представляет собой
 .
.
Выбор параметров усилителя мощности.
Входной ток и напряжение (вых. регулятора) Iвх = 1мА, Uвх = ±10В. Выходной ток и напряжение (подаваемое на двигатель) Iвых = 0,25А, Uвых = 110В + 20%. Тц = 1мс.
Передаточная функция усилителя мощности
 , где
, где  ,
,
![]() .
.
После соответствующих подстановок передаточная функция усилителя
 .
.
Выбор датчика скорости вращения вала.
В качестве датчика скорости вращения вала двигателя выбираем тахогенератор (ТГ) постоянного тока, функционально предназначенный для преобразования частоты вращения вала в пропорциональное частоте выходное напряжение постоянного тока. Такие тахогенераторы выполняются как маломощные генераторы с независимым возбуждением или магнитоэлектрическим возбуждением от постоянных магнитов. К недостаткам ТГПТ относятся: зона нечувствительности, зависящая от сопротивления щеточного контакта; пульсации выходного напряжения, обусловленные зубцовой структурой якоря и коммутацией на коллекторе; якорная пульсация, связанная с неровностями статора и ротора; высокая стоимость и большие габариты. К достоинствам можно отнести значительный диапазон измерения частоты вращения и аналоговый вид выходного сигнала.
Возьмем, например, тахогенератор СЛ-221 – коллекторный постоянного тока с независимым электромагнитным возбуждением. Режим работы - продолжительный. Технические данные следующие:
![]() .
.
Передаточная функция тахогенератора
![]() ,
,
 .
.
Выбор регулятора.
Регулятор выбирается из условия, чтобы при последовательном включении его с соответствующим звеном системы была скомпенсирована большая постоянная времени Т и взамен ее действовала существенно меньшая постоянная времени Т0. При этом результирующее эквивалентное звено, состоящее из исходного звена и регулятора, должно быть интегрирующим с передаточной функцией
 .
.
Так как передаточная функция объекта (двигателя) является колебательным звеном, то необходимо выбирать пропорционально-интегрально-дифференциальный (ПИД) регулятор, передаточная функция которого имеет вид:
 ,
, ![]() .
.
Запишем передаточную функцию двигателя в виде:

Рассчитаем параметры регулятора:
з ,
,
![]() .
.
Результирующая схема будет иметь вид, представленный на рисунке:
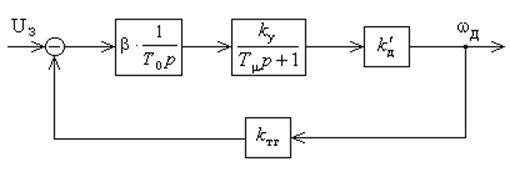 |
По заданному моменту нагрузки и построенной по исходным данным тахограмме для системы стабилизации скорости выбран ДПТ СЛ-621. Для изменения частоты вращения двигателя используется широтно-импульсное управление. Проверка по теплу показала, что выбранный двигатель не будет перегреваться при работе в соответствии с заданной тахограммой. Следовательно, СЛ-621 может использоваться в указанной системе.
1. Волков Н.И., Миловзоров В.П. Электромашинные устройства автоматики: Учеб. для вузов по спец. «Автоматика и телемеханика». – 2-е изд. – М.: Высшая школа, 1986.
2. Сабинин Ю.А. Электромашинные устройства автоматики: Учебник для вузов. – Л.: Энергоатомиздат. Ленингр. Отд-ние, 1988.
3. Русаков О.П. Курс лекций по курсу: Технические средства систем автоматики и управления.
4. Средства программирования MathCad2000Professional.
5. Средства программирования MathLab 5.3.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.