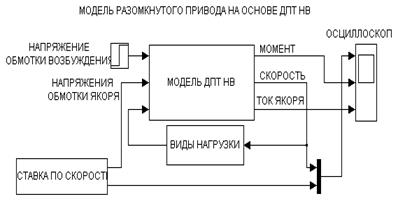
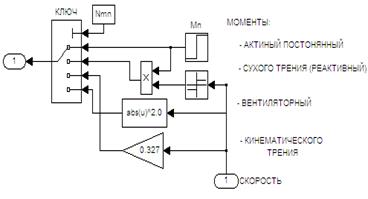
а б
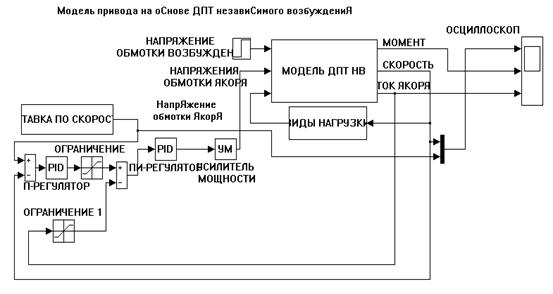
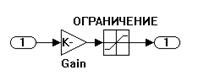
Рис. 6. Модель ДПТ независимого возбуждения (а) и блок-диаграмма реализации нагрузочного момента (б)
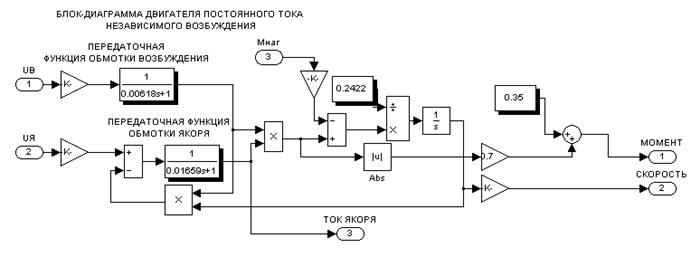
Рис.7. Блок-диаграмма ДПТ НВ
Результаты моделирования рис.8:
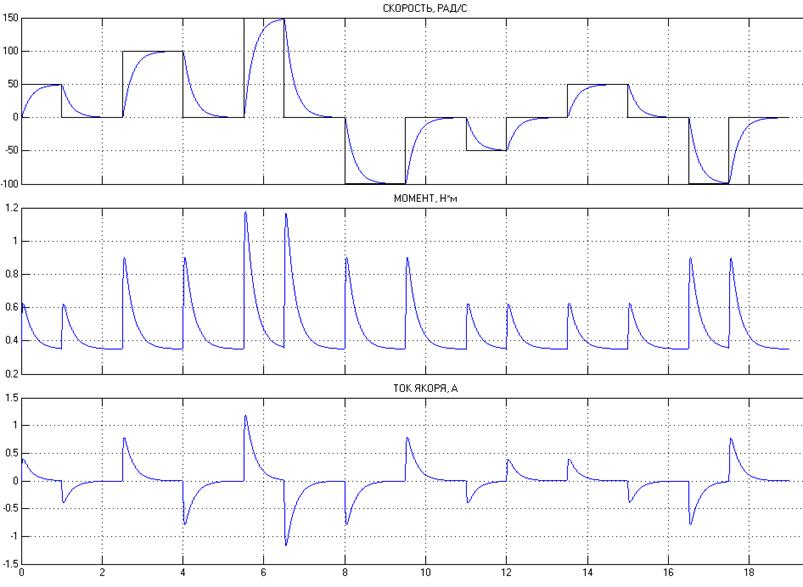
Рис. 8. Результаты моделирования разомкнутой системы
ДПТ без системы регулирования, не может работать при нагрузке Мнаг=0.35 Н×м, поскольку двигатель не сможет развить заданную скорость. Используем систему стабилизации скорости вращения на базе усилителя мощности (УМ) рис.9.
а б
Рис. 9. Функциональная модель системы регулирования сУМ (а) и блок-диаграмма реализации УМ (б)
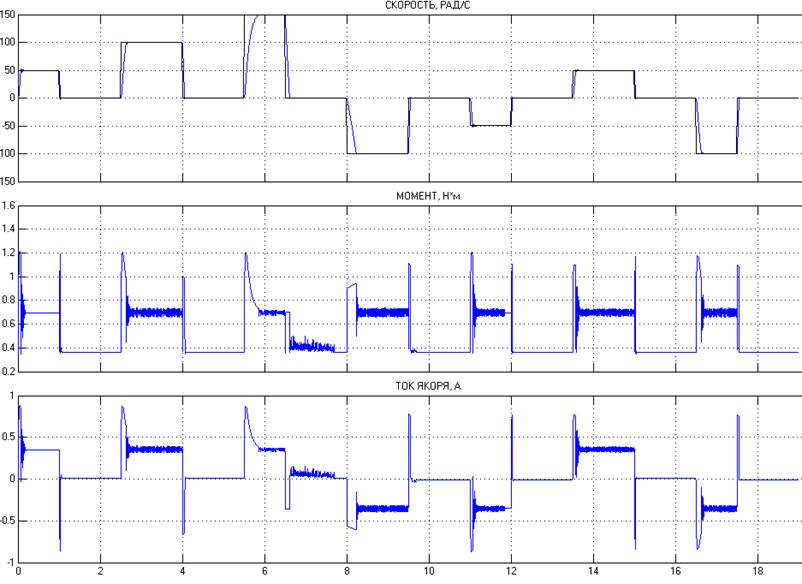
Рис. 10. Результаты моделирования системы регулирования с УМ
Введем в систему широтно-импульсный преобразователь согласно структурной схеме, приведенной на рис.11.
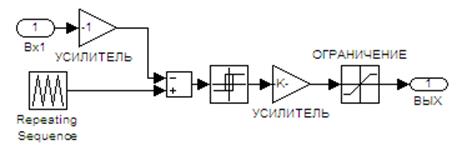
Рис. 11. Блок-диаграмма реализации ШИП
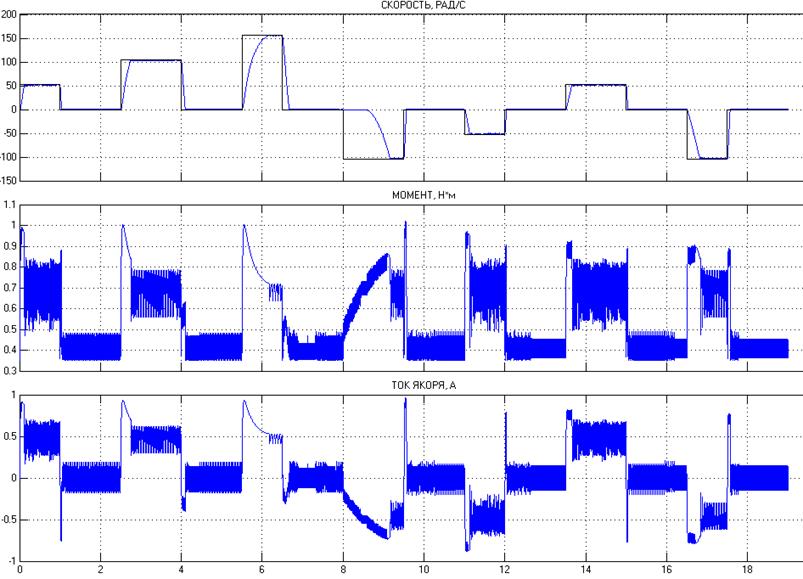
Рис. 12. Результаты моделирования системы регулирования с ШИП
По результатам моделирования переходный процесс получился затянутым, возможно сокращение времени переходного процесса, что в свою очередь приведет к перерегулированию и увеличению ошибки.
4. Выводы
1. Применение ШИП не отразилось на изменении скорости двигателя. При использовании ШИП появились пульсации тока якоря и момента (высокочастотная составляющая) в установившемся режиме, что обусловлено высокой частотой переключения ШИПа. Ток якоря ненамного превышает номинальное значение, в моменты торможения, то нет необходимости вводить дополнительные ограничения.
2. В моменты торможения, ток якоря принимает отрицательные значения и в структурной схеме ШИП не предусмотрено дополнительных сопротивления, которые коммутируются при противовключении двигателя, для гашения кинетической энергии, поэтому такой режим работы будет соответствовать режиму динамического торможения ДПТ.
3. Двигатель при отработке установки скорости вращения равной 150рад/c в момент времени от 5.5 с. до 6.5 с. не достигает нужной скорости, что объясняется ограничением напряжением якоря Uя=110В, в реализации УМ и ШИП.
1. Волков Н.И., Миловзоров В.П. Электромашинные устройства автоматики: Учеб. для вузов по спец. «Автоматика и телемеханика». – 2-е изд. – М.: Высшая школа, 1986.
2. Герман-Галкин М.И. Моделирование электротехнических устройств в среде MatLab.
3. Ю.А.Сабинин Электромашинные устройства автоматики: Учеб. Для вузов
4. Русаков О.П. «Технические средства систем автоматики и управления», курс лекций.
Приложение 1
Листинг программы:
%исходные данные
omega=[75 100 -100 150 -150 100 -75];
t_int=[3 2 3 2 3 2 3];
t_p=1;
M_load=35;
J=6.75;
M_st_frict=0.8;
M_nom=70;
M_start=105;
I_arm_nom=2.3;
M_load_new=M_load*1E-2;
M_st_frict_new=M_st_frict*1E-2;
M_nom_new=M_nom*1E-2;
M_start_new=M_start*1E-2;
M_p=0.687;
M_t=[0.687 0.687 0.687 0.687 0.687 0.687 0.687];
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.