Министерство образования РФ
Федеральное агентство по образованию
Новосибирский Государственный Технический Университет
Кафедра Автоматики
Разработка технического предложения
о возможности реализации системы
электропривода по требованиям
технического задания
Факультет: АВТ Преподаватель:
Группа: АА-28 Кондратьев В.А.
Студент: Удалова А.А.
Вариант: 23
Дата сдачи:
Отметка о защите:
Новосибирск, 2006
ВВЕДЕНИЕ
Актуальность обусловлена следующими обстоятельствами. Электропривод значительную долю времени работает в переходных режимах, т. е. при изменяющейся скорости. За счет возмущающих воздействий со стороны механизма довольно часты существенные колебания скорости. В переходных режимах пуска или торможения электропривода производственный процесс рабочей машины, как правило, либо не реализуется вовсе, либо протекает в заниженном темпе. Соответственно производительность рабочего органа в значительной мере зависит от быстроты протекания переходных процессов, и минимизация их длительности часто дает существенный выигрыш в выпуске изготовляемой продукции. Колебания скорости в стационарном режиме влияют на качество продукции, что вынуждает прибегать к стабилизации скорости.
Использование MatLab 5.3 для моделирования электропривода открывает широкие возможности в области статического моделирования, анализа, вычислений, задания структур данных и графического представления.
MatLab - наиболее развитая система программирования для научно-технических расчетов, дополненная несколькими десятками приложений, относящихся к вычислительной математике, обработке информации, конструированию электронных приборов, экономике и ряду других разделов прикладной науки. Имеет большие возможности для вывода двумерной и трехмерной графики. Это высокоуровневая система программирования, позволяющая резко сократить затраты труда при проверке алгоритмов и проведении прикидочных расчетов.
Цель работы. Разработка технического предложения о возможности реализации системы электропривода по требованиямтехнического задания.
Основные задачи. Предварительный выбор двигателя постоянного тока (ДПТ); расчет и построение диаграмм токов и моментов при пуске, торможении и установившемся режимах; выбор, обоснование и технические требования к устройству управления ДПТ; оценка параметров динамической модели ДПТ; моделирование двигателя; анализ результатов моделирования.
Методы и средства для решения поставленных задач. При помощи MatLab5.3, Simulink смоделировать систему управления ДПТ НВ, привести осциллограммы, тахограммы, провести анализ.
1. Техническое задание
По заданной тахограмме и моменту нагрузки, представленных табл.1 выбрать тип и мощность двигателя постоянного тока (ДПТ) для системы стабилизации скорости.
Таблица 1
|
Наименование параметра, размерность |
Данные |
||||||
|
Угловая скорость, рад/с |
75 |
100 |
-100 |
150 |
-150 |
100 |
-75 |
|
Длительность интервалов, с |
3 |
2 |
3 |
2 |
3 |
2 |
3 |
В соответствии с табл.1, при помощи MatLab 5.3 и (прил.1), построим тахограмму частоты вращения двигателя постоянного тока независимого возбуждения (ДПТ НВ) (рис.1).
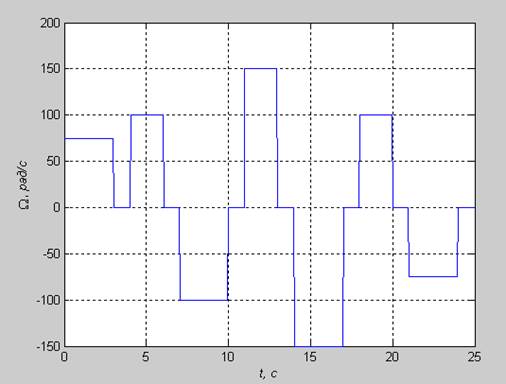
Рис. 1. Тахограмма угловой скорости вращения ДПТ
Длительность интервала работы ДПТ ![]() при угловой скорости вращения
при угловой скорости вращения ![]() и длительность паузы в работе ДПТ
и длительность паузы в работе ДПТ ![]() . Цикл работы ДПТ повторяется многократно.
. Цикл работы ДПТ повторяется многократно.
На ДТП приложен реактивный момент нагрузки, численно равный:
![]()
Дополнительные условия
На основании тахограмм и момента нагрузки Мнаг рассчитать среднеквадратичную мощность и сделать предварительный выбор двигателя. При необходимости применить редуктор (мультипликатор). При расчете КПД редуктора принять равным 0,75.
Рассчитать и построить диаграммы токов и моментов при пуске, торможении и установившемся движении. Момент торможения принять равным трем моментам нагрузки Мторм = 3 Мнаг.
![]() .
.
Выполнить проверку выбранного двигателя по теплу, используя метод эквивалентного тока или момента.
Выбрать и обосновать способ управления двигателем. Разработать функциональную схему управления двигателем.
Выполнить оценку параметров динамической модели двигателя и усилителя мощности.
2. Предварительный выбор двигателя
постоянного тока
Полная длительность цикла работы ДПТ:
 .
.
Минимальная частота вращения, развиваемая двигателем, об/мин
 , где Wмакс=150 рад/с.
, где Wмакс=150 рад/с.
Следовательно, минимальная частота должна быть не меньше
![]() .
.
Номинальный момент двигателя с учетом запаса, Н×м
![]() , где kз – коэффициент запаса
(принимается равным 1,2);
, где kз – коэффициент запаса
(принимается равным 1,2);
Мс – момент сухого трения, численно равный Мнаг.
![]() .
.
Исходя из расчетов, по каталогу [1] из серии двигателей «СЛ», выбираем двигатель постоянного тока независимого возбуждения СЛ-621, технические характеристики которого представлены в табл.2.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.