Таблица 2
|
Модель двигателя |
СЛ-621 |
|
Номинальное напряжение, В |
110 |
|
Номинальная мощность, Вт |
172 |
|
Номинальный ток возбуждения, А |
2,3 |
|
Номинальный ток якоря, А |
0,16 |
|
Номинальная частота вращения, об/мин |
2400 |
|
Номинальный вращающий
момент, Н |
7 |
|
Момент инерции якоря,
кг |
6,75 |
|
Пусковой момент, Н |
125 |
|
Статический момент
трения, Н |
3,8 |
|
Сопротивление обмотки возбуждения, Ом |
560 |
|
Сопротивление обмотки якоря, Ом |
3 |
|
Коэффициент самоиндукции якоря |
35 |
Расчет угловой номинальной скорости вращения ДПТ, опираясь на технические характеристики двигателя из табл.2, рад/с
 , где
nном –
номинальная частота вращения двигателя, равная 2400 об/мин;
, где
nном –
номинальная частота вращения двигателя, равная 2400 об/мин;
![]() .
.
Выбранный двигатель будет удовлетворять требованиям по моменту нагрузке и минимальной частоте вращения вала ДПТ.
Расчет и построение диаграмм токов и моментов при пуске,
торможении и установившемся движении
Время пуска и торможения в каждый момент времени, с
 (1)
(1)
 (2)
(2)
где J – приведенный момент инерции якоря, кг×м3
![]() , где kдв – коэффициент двигателя,
введенный с целью учета пусковых и тормозных моментов (принимается равным
1,15);
, где kдв – коэффициент двигателя,
введенный с целью учета пусковых и тормозных моментов (принимается равным
1,15);
Мст – статический момент трения.
Значения времен разгона tпускi и времен торможения tтормi приведены в табл.3.
Таблица 3
|
|
0,1325 |
0,1767 |
0,1767 |
0,2651 |
0,2651 |
0,1767 |
0,1325 |
|
|
0,0409 |
0,0545 |
0,0545 |
0,0818 |
0,0818 |
0,0545 |
0,0409 |
Диаграммы пусковых и тормозных моментов двигателя, построенных при помощи MatLab 5.3 и (прил.1).
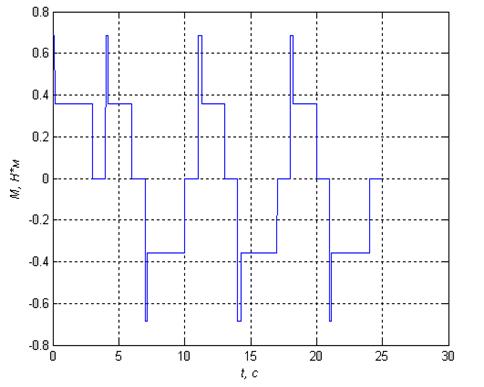
Рис. 2. Диаграммы пусковых и тормозных моментов
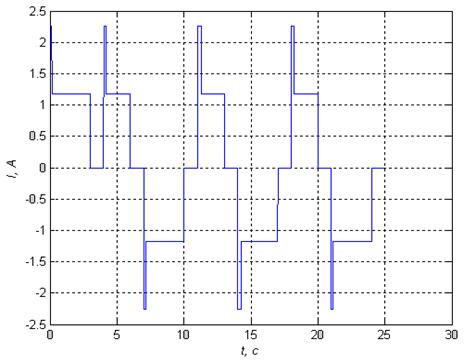
а б
Рис. 3. Диаграммы пусковых и тормозных токов
Оценка нагрузки выбранного двигателя постоянного тока, используя метод эквивалентного момента:
 (3)
(3)
Мэк= 0,546 Н![]() м
(4)
м
(4)
Из формулы (3) и (4) видно, что условие ![]() выполняется, следовательно, двигатель
будет работать в нормальном тепловом режиме.
выполняется, следовательно, двигатель
будет работать в нормальном тепловом режиме.
3. Выбор, обоснование и технические требования к устройству управления двигателем
Выбор и обоснование способа управления двигателем
В качестве устройства управления двигателя будем использовать реверсивный широтно-импульсный преобразователь - двигатель (ШИП-Д) (рис.4).
В зависимости от требуемого изменения
скорости вращения двигателя на выходе ШИМ появляются импульсы положительной
полярности (длительность ![]() , период
, период ![]() ), скважностью
), скважностью  . Они обеспечивают работу ключей VT1 и
VT3 при единице, ключей VT2 и VT4-при
нуле сигнала с ШИМ. Это приводит к формированию на УМ импульсов напряжения,
подаваемого на якорь, различной длительности и полярности.
. Они обеспечивают работу ключей VT1 и
VT3 при единице, ключей VT2 и VT4-при
нуле сигнала с ШИМ. Это приводит к формированию на УМ импульсов напряжения,
подаваемого на якорь, различной длительности и полярности.
Управление осуществляется по мостовой схеме, образованной четырьмя транзисторными ключами, к одной диагонали которой подведено напряжение питающей сети, а к другой присоединён якорь двигателя.
Диоды служат для замыкания цепи якоря через источник напряжения в те отрезки времени, когда ток якоря течёт под действием ЭДС самоиндукции навстречу напряжению источника.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.