типичные вопросы студентов, сидетельствующеие о незнании свойств систем стабилизации
(оТНОСИТСЯ К 2006 г )
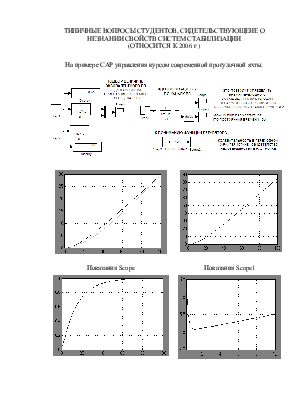
На примере САР управления курсом современной прогулочной яхты.
|
|
|
||
|
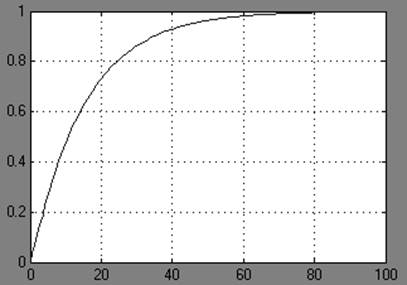
Показания Scope |
Показания Scope1 |
||
|
|
|
||
|
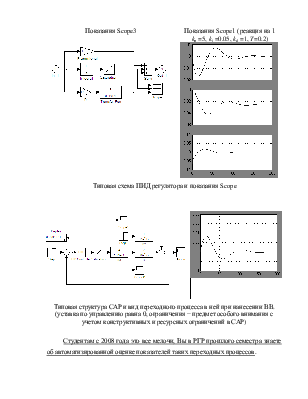
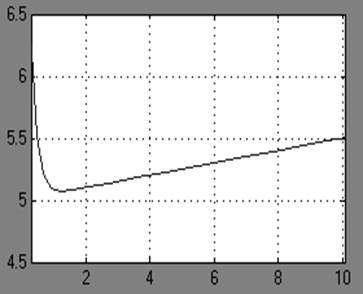
Показания Scope3 |
Показания Scope1 (реакция на 1 kp =5, ki =0.05, kd =1, T=0.2) |
||
|
|
|
||
|
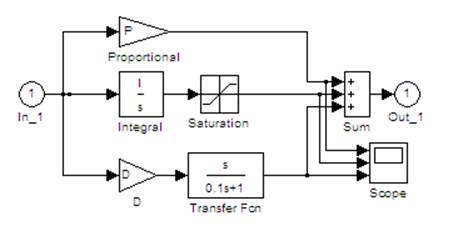
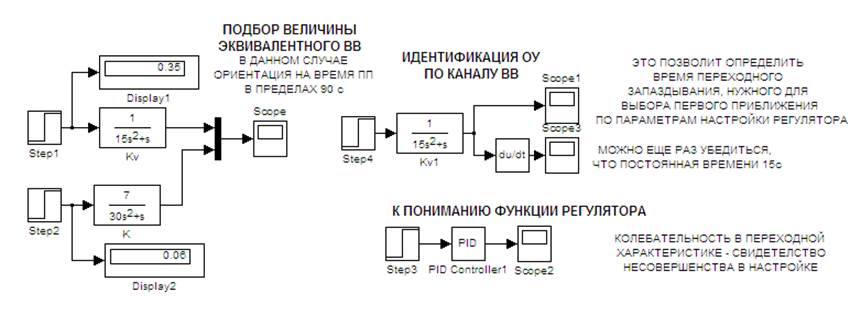
Типовая схема ПИД регулятора и показания Scope |
|||
|
|
|
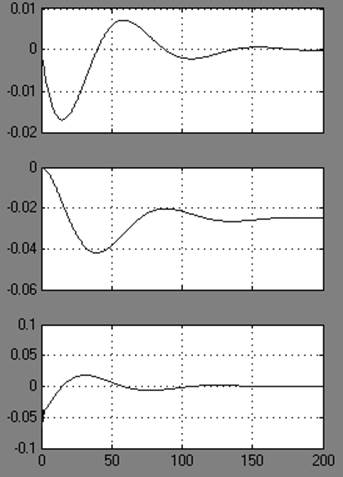
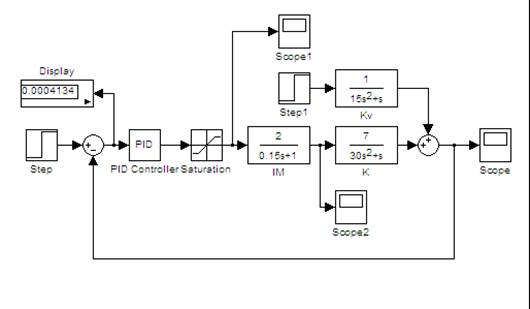
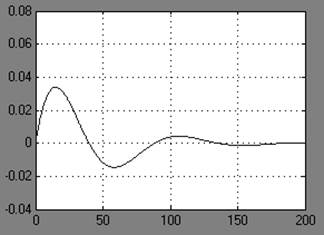
Типовая структура САР и вид переходного процесса в ней при нанесении ВВ.
(уставка по управлению равна 0, ограничения − предмет особого внимания с учетом конструктивных и ресурсных ограничений в САР)
Студентам с 2008 года это все мелочи, Вы в РГР прошлого семестра знаете об автоматизированной оценке показателей таких переходных процессов.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.