МИНЕСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
ФЕДЕРАЛЬНОЕ АГЕНСТВО ПО ОБРАЗОВАНИЮ
ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ
ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
НОВОСИБИРСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Кафедра Автоматики
Лабораторная работа №3
Исследование свойств оптимальной по быстродействию системы
Факультет: АВТ
Группа: ААМ-10
Студент: Преподаватель:
Солдаткин А. Французова Г.А.
Дата выполнения:
Отметка о защите:
Новосибирск, 2010
Цель работы: знакомство с принципом построения оптимальных и субоптимальных систем, анализом влияния основных параметров на ее переходные процессы и фазовый портрет.
Исходные данные:
Задан объект управления, модель которого имеет вид

![]()
Требуется обеспечить в замкнутой
системе оптимальные по быстродействию процессы перехода из произвольного
начального состояния
![]() в заданное конечное, которое
совпадает с началом координат, т.е.
в заданное конечное, которое
совпадает с началом координат, т.е. ![]() .
.
Расчет оптимального закона управления:
Формируется оптимальный закон управления в виде

где ![]() –
линия переключения управляющего воздействия, которая описывается уравнением
–
линия переключения управляющего воздействия, которая описывается уравнением
![]()
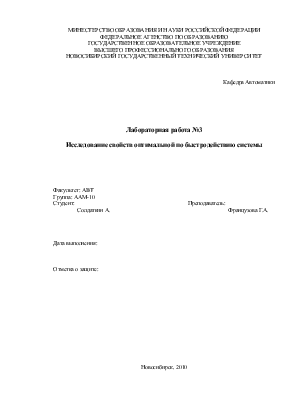
Рис. 1. Структурная схема оптимальной системы
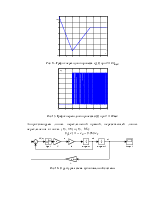
Рис. 2. Фазовая траектория из начальной точки ![]()
Рис. 3. График переходного процесса ![]()
Рис. 4. График переходного процесса ![]()
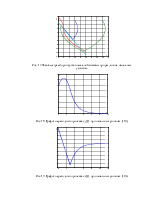
Рис. 5. График переходного процесса ![]()
Время
переходного процесса ![]()
Рис. 6. Фазовый портрет системы
Исследуем влияние ![]() на
оптимальные процессы
на
оптимальные процессы ![]() ,
, ![]() ,
, ![]() , задавая
, задавая ![]() ,
, ![]() .
.
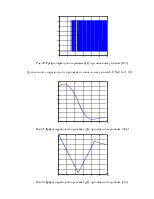
Рис. 7. График переходного процесса ![]() при
при ![]()
Рис. 8. График переходного процесса ![]() при
при ![]()
Рис. 9. График переходного процесса ![]() при
при ![]()
Рис. 10. График переходного процесса ![]() при
при ![]()
Рис. 11. График переходного процесса ![]() при
при ![]()
Рис. 12. График переходного процесса ![]() при
при ![]()
Исследуем влияние уровня
ограничения управляющего воздействия ![]() на оптимальные процессы
на оптимальные процессы ![]() ,
, ![]() ,
, ![]() , задавая
, задавая ![]() .
.
Рис. 13. График переходного процесса ![]() при
при ![]()
Рис. 14. График переходного процесса ![]() при
при ![]()
Рис. 15. График переходного процесса ![]() при
при ![]()
Аппроксимируем линию переключений прямой, пересекающей линию переключения в точках (-15, 9.8) и (15, -9.8):
![]()
Рис. 16. Структурная схема субоптимальной системы
Рис. 17. Фазовые траектории субоптимальной системы при различных начальных условиях.
Рис. 18. График переходного процесса ![]() , при начальных условиях (10,4)
, при начальных условиях (10,4)
Рис. 19. График переходного процесса ![]() , при начальных условиях (10,4)
, при начальных условиях (10,4)
Рис. 20. График переходного процесса ![]() , при начальных условиях (10,4)
, при начальных условиях (10,4)
Длительность
переходного процесса из начальных условий (10,4) ![]() .
.
Рис. 21. График переходного процесса ![]() , при начальных условиях (35,4)
, при начальных условиях (35,4)
Рис. 22. График переходного процесса ![]() , при начальных условиях (35,4)
, при начальных условиях (35,4)
Рис. 23. График переходного процесса ![]() , при начальных условиях (35,4)
, при начальных условиях (35,4)
Длительность
переходного процесса из начальных условий (35,4) ![]() .
.
Рис. 24. Фазовая траектория субоптимальной системы при начальных условиях (30,0).
Рис. 25. График переходного процесса ![]() , при начальных условиях (30,0)
, при начальных условиях (30,0)
Рис. 26. График переходного процесса ![]() , при начальных условиях (30,0)
, при начальных условиях (30,0)
Рис. 27. График переходного процесса ![]() , при начальных условиях (30,0)
, при начальных условиях (30,0)
Длительность
переходного процесса из начальных условий (30,0) ![]() .
.
Исследуем влияние ![]() на
субоптимальные процессы, задавая
на
субоптимальные процессы, задавая ![]() .
.
Аппроксимируем линию переключений прямой, пересекающей линию переключения в точках (-4.9, 3.75) и (4.9, -3.75):
![]()
Рис. 28. Фазовые траектории субоптимальной системы при различных начальных условиях.
Рис. 29. График переходного процесса ![]() , при начальных условиях (1,4)
, при начальных условиях (1,4)
Рис. 30. График переходного процесса ![]() , при начальных условиях (1,4)
, при начальных условиях (1,4)
Рис. 31. График переходного процесса ![]() , при начальных условиях (1,4)
, при начальных условиях (1,4)
Длительность
переходного процесса из начальных условий (1,4) ![]() .
.
Рис. 32. График переходного процесса ![]() , при начальных условиях (10,4)
, при начальных условиях (10,4)
Рис. 33. График переходного процесса ![]() , при начальных условиях (10,4)
, при начальных условиях (10,4)
Рис. 34. График переходного процесса ![]() , при начальных условиях (10,4)
, при начальных условиях (10,4)
Длительность
переходного процесса из начальных условий (10,4) ![]() .
.
Вывод:
В ходе работы была разработана и исследована оптимальная система управления.
При переводе объекта из точки (15, 4) в начало координат происходит одно переключение управляющего воздействия, что согласуется с теоремой о числе переключений (по теореме в такой системе может быть не больше одного переключения).
При изменении коэффициента усиления объекта система движется не по оптимальным траекториям. При увеличении коэффициента усиления переход в конечную точку осуществляется за меньшее время, но не за минимально возможное для такого значения коэффициента.
Увеличение максимального значения управления так же приводит к уменьшению времени перехода в конечную точку, но это время является так же не оптимальным.
Субоптимальная система была получена путем аппроксимации поверхности переключения прямой, проходящей через заданные точки. В субоптимальной системе возникает скользящий режим.
Процессы в субоптимальной системе будут существенно зависеть от начальных условий. Так, при движении из точки (10,4) изображающая точка системы попадает на реальную линию переключений, а затем движется вдоль нее в скользящем режиме. Из начальной точки (35,4) изображающая точка системы будет доходить до реальной линии переключений, переключаться на траекторию, соответствующую другому знаку управления, вновь попадает на реальную линию переключений и двигается вдоль нее в скользящем режиме. Из начальных условий (30,0) изображающая точка системы будет попадать в точку пересечения идеальной и реальной линий переключения и к началу координат будет двигаться по оптимальной траектории.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.