


МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ
ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ
ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
НОВОСИБИРСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Кафедра Автоматики
Лабораторная работа №1
Моделирование структур для оценки переходных процессов
Факультет: АВТ
Группа: АА-67
Студент: Кутузова И.В. Преподаватель: Кондратьев В.А.
Дата выполнения: 12.03.10
Отметка о защите:
Новосибирск
2010
Цель работы
Приобретение навыков моделирования модулей для оценки качества переходного процесса на примере линейной системы второго порядка.
1. Подобрать объект, чтобы вид переходного процесса в замкнутой системе качественно повторял рис.1.;
Рис. 1. Вид переходного процесса в замкнутой системе.
2. Смоделировать систему в программе Matlab. Получить график переходного процесса;
3. С помощью элементов библиотеки Simulink собрать модуль, выполняющий расчет величины перерегулирования переходного процесса;
4. С помощью элементов библиотеки Simulink собрать модуль, выполняющий определение длительности переходного процесса;
5. Проверить корректность работы модулей, оценив переходный процесс системы.
Результаты работы
Выбор объекта
Исходными данными для выбора объекта является вид переходного процесса на рис. 1. Поскольку процесс является колебательным, объект должен быть не ниже второго порядка. В общем случае передаточная функция объекта второго порядка имеет вид:
W(p)= , (1)
, (1)
где K – коэффициент усиления;
![]() ,
,![]() –
коэффициенты характеристического полинома.
–
коэффициенты характеристического полинома.
Примем K =10;
![]() =1;
=1;
![]() =2.
=2.
Переходный процесс в замкнутой системе изображен на рис.2
Рис. 2. График переходного процесса системы.
Моделирование системы
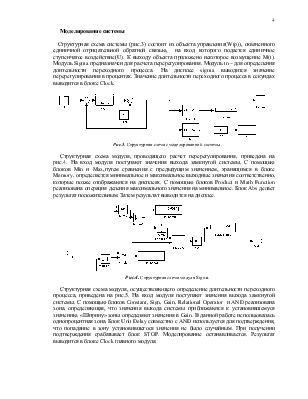
Структурная схема системы (рис.3) состоит из объекта управления(W(p)), охваченного единичной отрицательной обратной связью, на вход которого подается единичное ступенчатое воздействие(U). К выходу объекта приложено некоторое возмущение M(t). Модуль Sigma предназначен для расчета перерегулирования. Модуль tn – для определения длительности переходного процесса. На дисплее sigma выводится значение перерегулирования в процентах. Значение длительности переходного процесса в секундах выводится в блоке Clock.
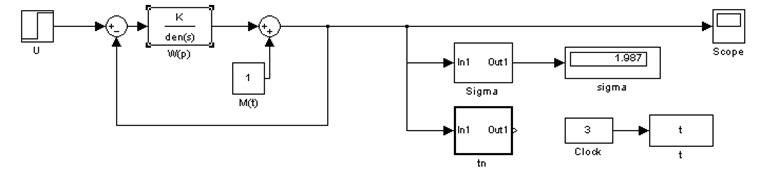
Рис.3. Структурная схема смоделированной системы.
Структурная схема модуля, проводящего расчет перерегулирования, приведена на рис.4. На вход модуля поступают значения выхода замкнутой системы. С помощью блоков Min и Max,путем сравнения с предыдущим значением, хранящимся в блоке Memory, определяется минимальное и максимальное выходные значения соответственно, которые позже отображаются на дисплеях. С помощью блоков Product и Math Function реализована операция деления максимального значения на минимальное. Блок Abs делает результат положительным. Затем результат выводится на дисплее.
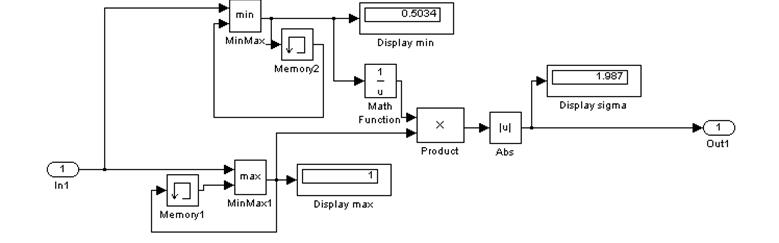
Рис.4. Структурная схема модуля Sigma.
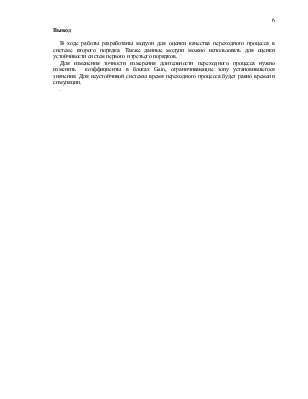
Структурная схема модуля, осуществляющего определение длительности переходного процесса, приведена на рис.5. На вход модуля поступают значения выхода замкнутой системы. С помощью блоков Constant, Sign, Gain, Relational Operator и AND реализована зона, определяющая, что значения выхода системы приближаются к установившемуся значению. «Ширину» зоны определяют значения в Gain. В данной работе использовалась однопроцентная зона. Блок Unit Delay совместно с AND используется для подтверждения, что попадание в зону установившегося значения не было случайным. При получении подтверждения срабатывает блок STOP. Моделирование останавливается. Результат выводится в блоке Clock главного модуля.

Рис.5. Структурная схема модуля tn.
Результаты моделирования
В ходе моделирования получены следующие результаты:
Длительность переходного процесса: 7.388 с
Перерегулирование: 59.48 %
Результаты соответствуют графику переходного процесса на рис.2., следовательно, для данного типа систем модули работают корректно.
Вывод
В ходе работы разработаны модули для оценки качества переходного процесса в системе второго порядка. Также данные модули можно использовать для оценки устойчивости систем первого и третьего порядков.
Для изменения точности измерения длительности переходного процесса нужно изменить коэффициенты в блоках Gain, ограничивающие зону установившегося значения. Для неустойчивой системы время переходного процесса будет равно времени симуляции.
.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.