МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
ФЕДЕРАЛЬНОЕ АГЕНСТВО ПО ОБРАЗОВАНИЮ
ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ
ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
НОВОСИБИРСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Кафедра Автоматики
Расчетно-графическая работа №1
по курсу
Оптимальные и адаптивные системы
Факультет: АВТ
Группа: ААМ-10
Студент: Преподаватель:
Ливенец Д. Французова Г.А.
Вариант: 7
Дата выполнения:
Отметка о защите:
Новосибирск, 2010
Цель работы: рассчитать и исследовать с помощью моделирования в среде MATLAB систему экстремального регулирования (с учетом необходимых оценок производных) для объекта, математическая модель которого имеет вид:
Известны ограничения на переменные
состояния и управляющие воздействия: ![]() ,
, ![]() ,
, ![]() . Заданы требования к
качеству процесса выхода на экстремум в виде следующих оценок:
. Заданы требования к
качеству процесса выхода на экстремум в виде следующих оценок: ![]() и
и ![]() .
Численные значения параметров представлены в таблице 1.
.
Численные значения параметров представлены в таблице 1.
Таблица 1
|
Параметр |
|
|
|
|
|
|
|
|
|
Значение |
0 |
-2 |
2 |
3 |
0 |
8 |
1 |
1 |
|
Параметр |
|
|
|
|
|
|
|
|
|
Значение |
2 |
1 |
2 |
20 |
60 |
500 |
3 |
0 |
Решение:
Рассмотрим систему уравнений, описывающих объект в следующем виде:

Так как в данном случае относительный порядок объекта равен единицы, то закон управления выглядит следующим образом:
![]()
где ![]() –
параметр регулятора, а
–
параметр регулятора, а ![]() – желаемое уравнение. Сформируем желаемое
уравнение исходя из заданных требований к системе. На основании требований к
динамике процессов выберем корень характеристического уравнения
– желаемое уравнение. Сформируем желаемое
уравнение исходя из заданных требований к системе. На основании требований к
динамике процессов выберем корень характеристического уравнения ![]() .
.
![]()
Учитывая требования к статике
![]()
получим
![]()
![]()
Преобразуем уравнение с учетом градиента:
![]()
Для выбора параметра регулятора ![]() запишем
уравнение объекта в следующем виде:
запишем
уравнение объекта в следующем виде:
![]()
![]()
где ![]() ,
, ![]() .
.
Параметр ![]() выбираем
из условия
выбираем
из условия ![]() , учитвая что
, учитвая что ![]() , выберем:
, выберем:
![]()
Проверим условие разрешимости задачи синтеза:
![]()
![]()
![]()
Таким образом, ресурса управления достаточно для реализации сформированного желаемого уравнения.
Так как производная выходного сигнала недоступна для измерения, то вместо точного значения производной будем пользоваться ее оценкой:
![]()
где ![]() – оценка производной выходного
сигнала получаемая с помощью дифференцирующего фильтра.
– оценка производной выходного
сигнала получаемая с помощью дифференцирующего фильтра.
Для оценки производной выходного сигнала воспользуемся дифференцирующим фильтром. При отсутствии помех измерения можно воспользоваться фильтром первого порядка:
где ![]() – постоянная времени
дифференцирующего фильтра, выбираемая из условия разделимости движений:
– постоянная времени
дифференцирующего фильтра, выбираемая из условия разделимости движений:
![]()
Для получения оценки градиента ![]() будем
использовать фильтр оценки частной производной, модель которого имеет вид:
будем
использовать фильтр оценки частной производной, модель которого имеет вид:
где ![]() – постоянная времени
дифференцирующего фильтра, выбираемая из условия разделимости движений:
– постоянная времени
дифференцирующего фильтра, выбираемая из условия разделимости движений:
![]()
Результаты моделирования:
Структурная схема системы поиска
экстремума показана на рис. 1. Моделирование проводилось при ![]()
![]() ,
, ![]() . Графики переходных процессов
. Графики переходных процессов ![]() , а так же траектория движения
системы на плоскости
, а так же траектория движения
системы на плоскости ![]() , представлены на рис. 2- 6
соответственно.
, представлены на рис. 2- 6
соответственно.
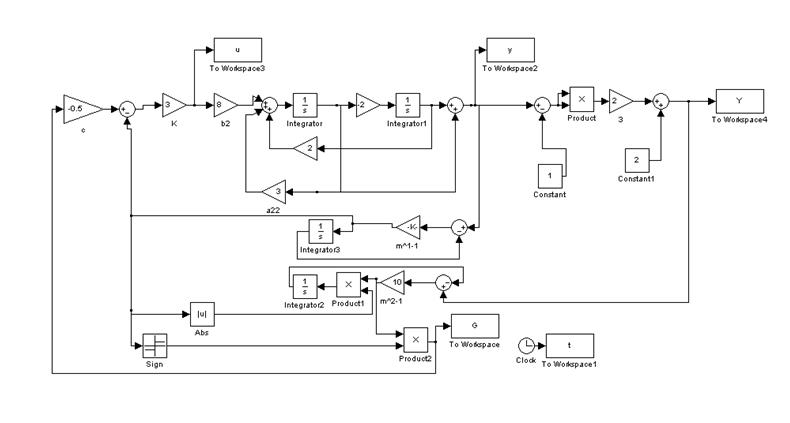
Рис. 1. Структурная схема системы поиска экстремума
Поскольку корень числителя данной передаточной функции исходного объекта положительный и находится в правой полуплоскости, то объект будет неустойчив, значит не выполняется условие разрешимости задачи синтеза. Следовательно, такой объект нельзя стабилизировать.
Возьмем объект с измененными параметрами, которые удовлетворяют условиям:
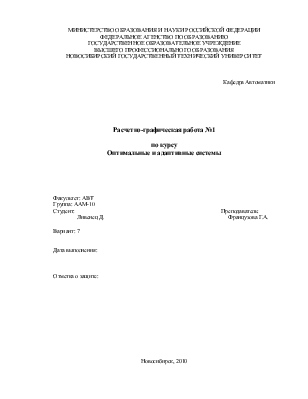
Результаты моделирования этого объекта при тех же самых начальных условиях показаны на рис.7-11.
Рис. 2. График переходного процесса ![]()
Рис. 3. График переходного процесса ![]()
Рис. 4. График переходного процесса ![]()
Рис. 5. График переходного процесса ![]()
Рис. 6. Траектория движения системы на плоскости ![]()
Рис. 7. График переходного процесса ![]()

Рис. 8.
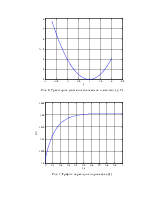
График переходного процесса ![]()
Рис. 9.
График переходного процесса ![]()
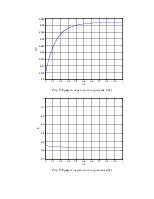
Рис. 10.
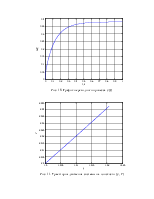
График переходного процесса ![]()
Рис. 11.
Траектория движения системы на плоскости ![]()
Выводы
Для заданного объекта управления
была рассчитана система экстремального регулирования,
но т.к. объект неустойчив не удалось его стабилизировать. Исследовали
объект с измененными параметрами. Время переходного процесса ![]() и
и ![]() , что удовлетворяет заданным требованиям к
качеству процесса выхода на экстремум.
, что удовлетворяет заданным требованиям к
качеству процесса выхода на экстремум.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.