МИНИСТЕРСТВО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ
НОВОСИБИРСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Кафедра вычислительной техники
Дисциплина “Основы теории управления”
Расчетно-графическая работа
На тему:
Расчет устройства управления для системы из 3-х грузов на пружине
Группа: АМ-110
Студент: Каюров В.Н
Вариант: 9
Преподаватель: Воевода А.А.
Новосибирск 2003
1. Задание
Найти устройство управления для заданной системы такое, чтобы система была устойчивой
2. Математическое описание системы
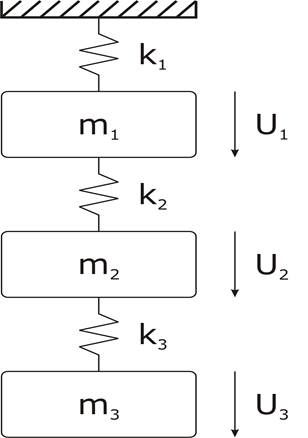
Индивидуальные данные:
m1=m2=m3=1, k1=k2=k3=1
U1=0
Регулировать выходы y2,y3
Уравнения Ньютона для системы:
![]()
![]()
![]()
После преобразования Лапласа получаем:
![]()
![]()
![]()
Выразим y1, y2 и y3:



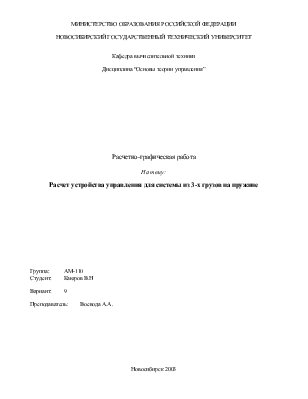
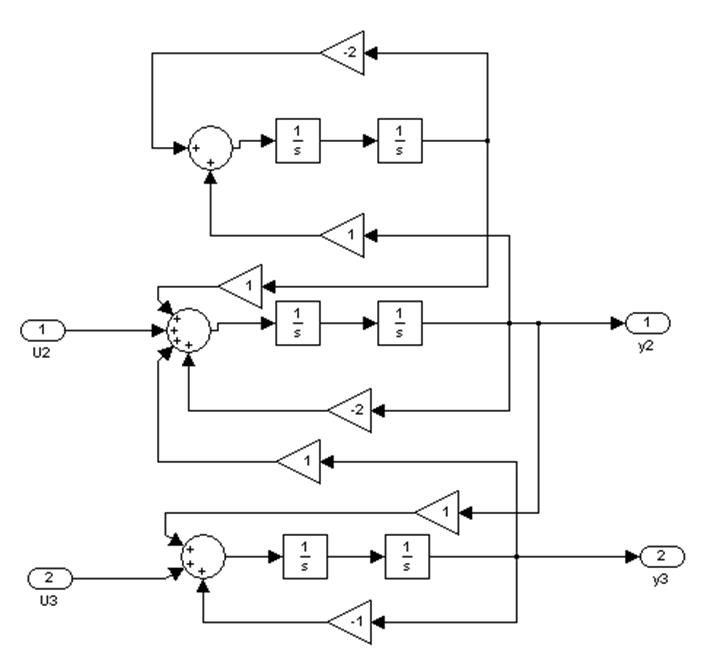
3. 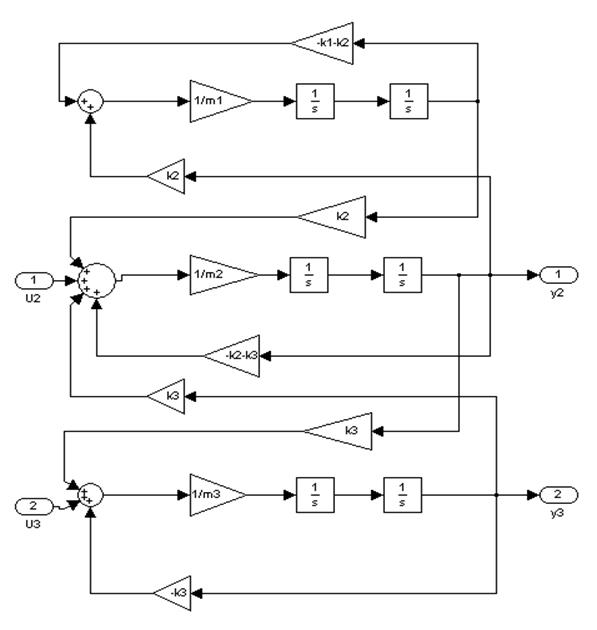 Структурная схема исходной системы
Структурная схема исходной системы
После упрощения, т.к. mi=ki=1 получаем:
Структурная схема после упрощения, учитывая, что U1 и y1 нулевые
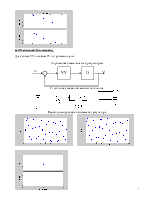
4. Синтез устройства управления (УУ) алгебраическим методом
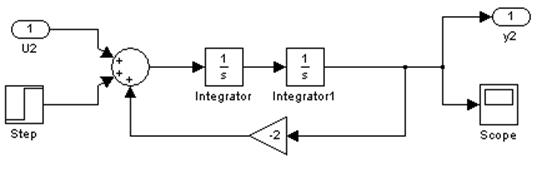
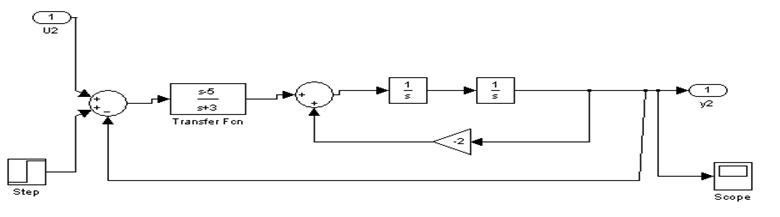
а) УУ для входа U2 и выхода y2
Для синтеза УУ положим U3 и y3 равными нулю.
Упрощенная схема объекта с регулятором
 |
Структурная схема системы без регулятора
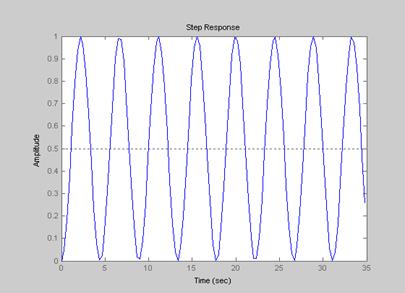
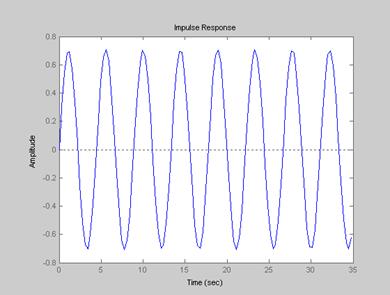
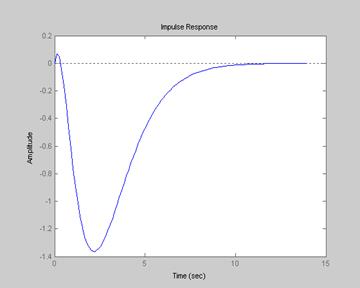
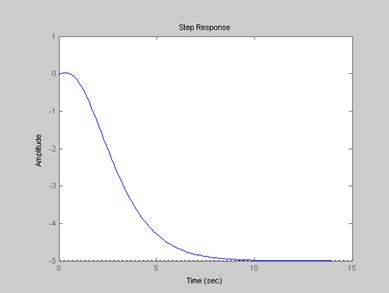
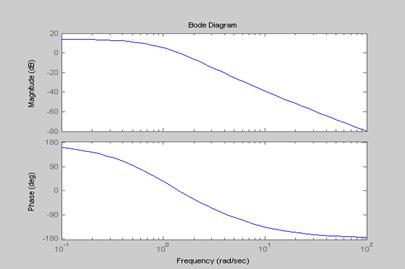
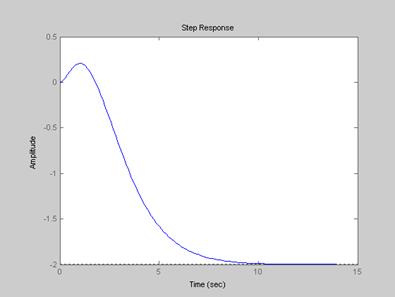
Переходные процессы в системе без регулятора
Расчет регулятора.
Для
начала найдем 
![]() было найдено посредством MathLab
с помощью данной программы:
было найдено посредством MathLab
с помощью данной программы:
[a,b,c,d] = linmod('u2y2'); //исходный файл схемы
sys=tf(ss(a,b,c,d)) //трансфертная функция
Степень регулятора на порядок
ниже, поэтому получаем ![]() в общем виде:
в общем виде:
Для замкнутой системы получаем:

Х.П.З.С. системы с регулятором:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
 =
=![]()
![]()
![]()
![]()
![]()
![]()
Приравнивая коэффициенты при соответствующих степенях S, и, решая полученную
систему уравнений, получим:
![]()
![]()
![]()
![]()
Подставим полученные значения:

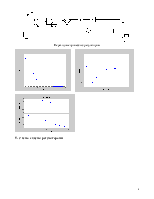
Схема с регулятором
Переходные процессы с регулятором
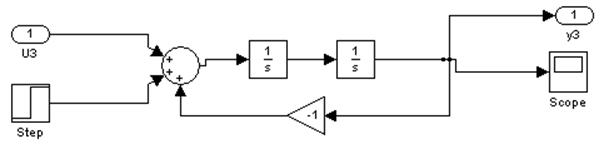
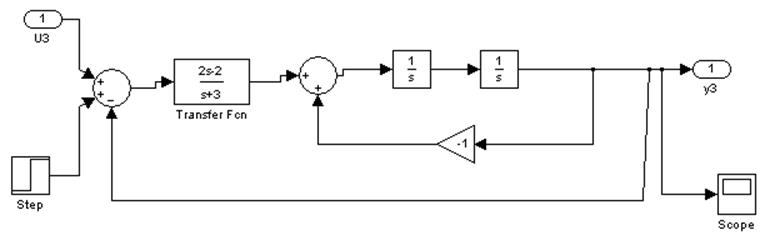
б) УУ для входа U3 и выхода y3
Для синтеза УУ положим U2 и y2 равными нулю.
Упрощенная схема объекта с регулятором
 |
Структурная схема системы без регулятора
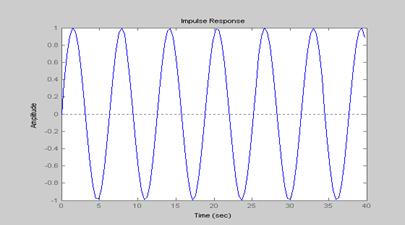
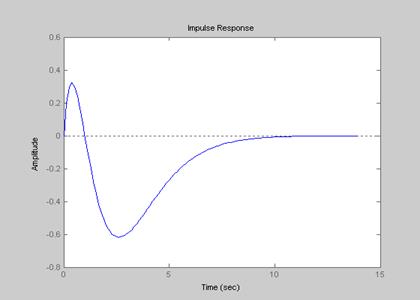
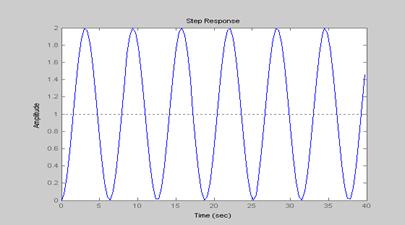 Переходные процессы в системе без регулятора
Переходные процессы в системе без регулятора
Расчет регулятора.
Для
начала найдем
![]() было найдено посредством MathLab
с помощью данной программы:
было найдено посредством MathLab
с помощью данной программы:
[a,b,c,d] = linmod('u3y3'); //исходный файл схемы
sys=tf(ss(a,b,c,d)) //трансфертная функция
Степень регулятора на порядок
ниже, поэтому получаем ![]() в общем виде:
в общем виде:
Для замкнутой системы получаем:
Х.П.З.С. системы с регулятором:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
 =
=![]()
![]()
![]()
![]()
![]()
![]()
Приравнивая коэффициенты при соответствующих степенях S, и, решая полученную
систему уравнений, получим:
![]()
![]()
![]()
![]()
Подставим полученные значения:
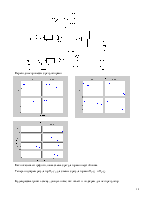
Схема с регулятором
Переходные процессы с регулятором
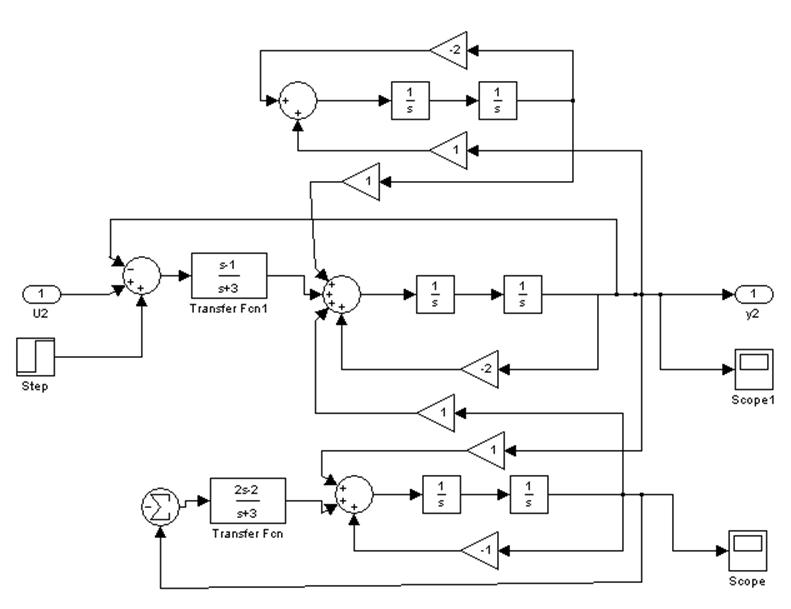
5. Схема с двумя регуляторами
Переходные процессы с регуляторами
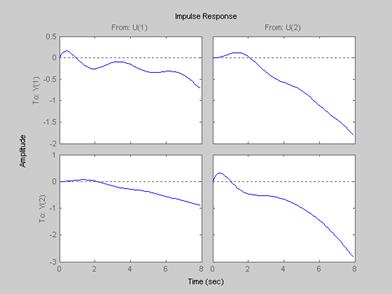
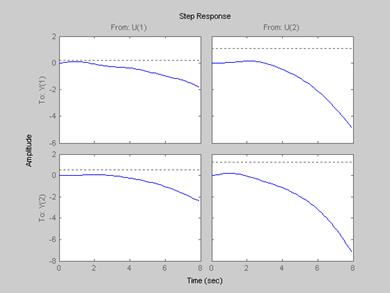
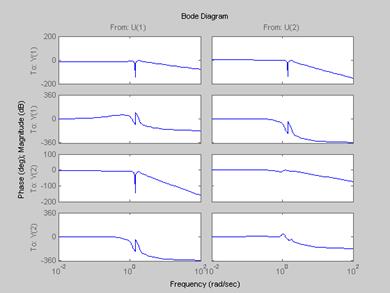
Как показывают графики, наша схема с регуляторами неустойчивая.
Теперь подберем регулятор U2-y2 для схемы с регуляторами U2-y2 и U3-y3.
Будем рассматривать схему, данную ниже, как объект и подберем для него регулятор
Для
начала найдем
![]() было найдено посредством MathLab
с помощью данной программы:
было найдено посредством MathLab
с помощью данной программы:
[a,b,c,d] = linmod('u1y3'); //исходный файл схемы
sys=tf(ss(a,b,c,d)) //трансфертная функция

Степень регулятора на порядок
ниже, поэтому получаем ![]() в общем виде:
в общем виде:

Для замкнутой системы получаем:
Х.П.З.С. системы с регулятором:
![]()
Произведем вычисления с помощью Excel в матричном виде:![]()
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.