Содержание
!!!Переписать
Цель работы.. 2
Диаграмма вариантов использования (USE-CASE Diagram) 2
Потоки событий. 4
Диаграмма деятельности (Activity Diagram) 5
Диаграмма классов (Class Diagram) 7
Диаграмма последовательности (Sequence Diagram) 8
Диаграмма размещения (Deployment Diagram) 10
Разработать информационную систему для разработки аппаратного обеспечения средствами Rational Rose.
Задачи работы:
- Разработка и описание модели данных системы;
- Создание диаграмм в среде Rational Rose.
- Разработка сценариев тестирования
. Предметнаяобластьиформулировказадачи
Необходимо разработать встроенную систему для управления шестиколесным шасси Dagu Wild Thumper. Передача данных, на основе которых производится управления электромоторами шасси, должна осуществляться с одноплатного компьютера, под управлением операционной системы Linux, с помощью стандартного периферийного интерфейса USB.
Основной задачей системы является изменение частоты и направления вращения электромоторов, которые приводят в движение платформу. Управление должно осуществляться микроконтроллером, архитектура которого задана изначально: 8 — битный AVR микроконтроллер.
2. Анализиопределениетребованийксистеме
Согласно поставленной задаче необходимо разработать систему телеуправления, где в качестве передающей стороны используется одноплатный компьютер, а в качестве приемной - микроконтроллер, который в свою очередь на основе данных, полученных от передающей стороны, изменяет частоту и направление вращения электромоторов. На основе этого можно выделить несколько групп требований к системе.
2.1. Операционные требования
Операционные требования определяют каким образом система должна взаимодействовать с другими элементами (действующими лицами) в её окружении. Проектируемая система должна взаимодействовать с внешним программным модулем с помощью одного из средств IPC в ОС Linux, а так же с микроконтроллером при помощи периферийного интерфейса USB. Из последнего вытекает, что система так же должна взаимодействовать с драйвером шины USB в ОС Linux. Следовательно, операционные требование к проектируемой системе можно представить в виде:
-обмен данными с внешним программным модулем при помощи одного из средств IPC (анонимный канал);
-передача данных микроконтроллеру по интерфейсу USB;
-взаимодействие с драйвером шины USB.
2.2. Функциональные требования
Функциональные требования определяют поведение системы. Основное функциональное требование системы — это управление электромоторами, то есть изменение частоты и направления вращения электромоторов в зависимости от данных, полученных от стороннего модуля, при помощи широтно — импульсной модуляции. Однако для движения платформы не обязательно управлять каждым из шести электромоторов в отдельности, достаточно подавать два сигнала управления на каждые три электромотора с каждой стороны платформы. Таким образом функциональные требования к системе сводятся к:
-изменение частоты вращения двигателей с помощью ШИМ;
-изменение направления вращения двигателей.
2.3. Требования к качеству работы системы
Требования к качеству работы системы аналогичны требованиям, предъявляемым к устройствам в спецификации на интерфейс USB, а так же в спецификации на USB HID устройства. Так же к системе предъявляются требования к нагрузочной способности, то есть, вне зависимости от загруженности ЦПУ одноплатного компьютера, система должна своевременно передавать данные для управления двигателями. Следовательно, тербования к качеству системы можно представить в виде:
-соответствие спецификациям USB и USB HID;
-высокая нагрузочная способность;
2.4. Проектные требования
С целью уменьшения времени разработки, а так же стоимости системы, к проектированию предъявляются следующие требования:
-использование библиотеки LUFA, выпущенной под лицензией MIT, для реализации программного обеспечения микроконтроллера;
-использование библиотеки HID API, выпущенной под лицензией GPL, для реализации программного обеспечения одноплатного компьютера.
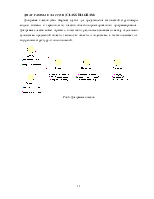
Каждый вариант использования определяет последовательность действий, которые должны быть выполнены проектируемой системой при взаимодействии ее с соответствующим актером.
Рис. 1. Диаграмма вариантов использования
Актер Пользователь
Задает условия работы двигателя
Актер Тахометр
Определяет скорость, с которой работает двигатель
Актер Датчик
Определяет на сколько градусов отклоняется ротор двигателя от своего изначального положения
Актер Фильтр
Обрабатывает значения, полученные с датчика и тахометра, формирует сигнал для контроллера.
Актер Контроллер
Из данных, полученных с фильтра формирует сигнал для двигателя
Актер Двигатель
Не выполняет никаких действий с системой, является объектом управления.
!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
Вариант использования «задать скорость».
Предусловие
Питание включено.
Основной поток
1. Пользователь вводит значение скорости.
2. Проверка введенного значения. Если значение больше номинального, выполняется альтернативны поток А1.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.