Благодаря технологии LTI-объектов дискретные и непрерывные модели обрабатываются совершенно одинаково. Преобразования непрерывных систем в дискретные и обратно представлены соответственно функциями c2d(), d2c(), а также d2d() для изменения тактовой частоты.
Связь между параметрами преобразования
Лапласа и Z-преобразования задается известным
соотношением (2.3), но функция exp комплексного
аргумента является периодической, поэтому взаимно однозначного соответствия между
дискретными и непрерывными реализациями в общем случае не существует.
Наглядное представление о преобразовании можно получить, воспользовавшись
функциями построения линий сеток s-плоскости и z-плоскости.
Область взаимно однозначного соответствия определяется на s-плоскости двумя горизонтальными
линиями ![]() , где
, где ![]() −
частота Найквиста (половина частоты дискретизации).
−
частота Найквиста (половина частоты дискретизации).
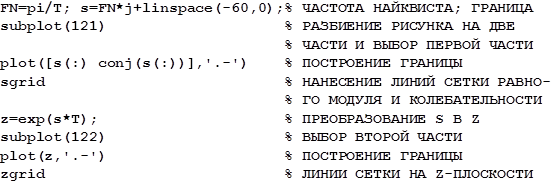
В результате получатся две диаграммы, представленные рис. 2.6 (а – изображена s-плоскость; б – изображена z-плоскость).
а б
Рис. 2.6. Интерпретация преобразования z= exp (sT)
Линии сетки удобно использовать при исследовании корневых портретов.
Исследовать устойчивость можно по корневому портрету, его построение выполняет функция pzmap().
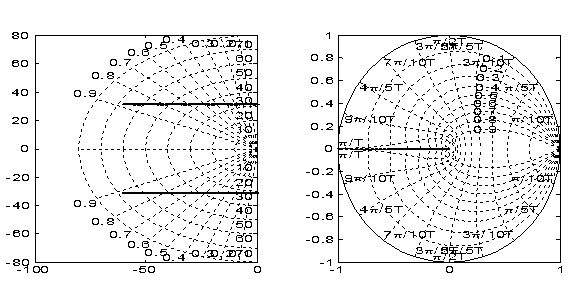
Области устойчивости непрерывных (левая полуплоскость) и дискретных (круг единичного радиуса) систем для полюсов различаются очень сильно (рис. 2.6). Однако частотные критерии устойчивости совпадают, хотя сами частотные характеристики различаются. Для визуализации частотных и временных характеристик можно просто перечислить интересующие модели как дискретные, так и непрерывные в одном списке при вызове соответствующих функций. Это было использовано в примере 2.3. Аналогичным образом можно построить годографы Найквиста (рис. 2.7):

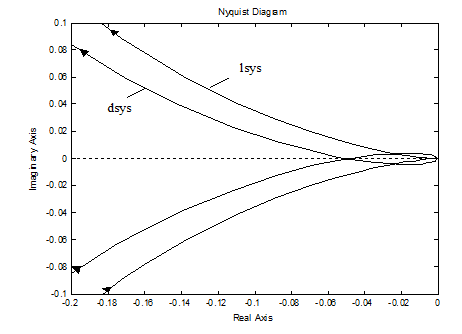
Рис. 2.7. Годографы Найквиста из примера 2.2
Сопоставляя годографы, можно отметить, что годограф дискретной модели захватывает третий квадрант, а непрерывной – нет.
В реальных системах внешний по отношению к микропроцессору сигнал перед обработкой превращается в цифровую форму посредством АЦП и обратно в аналоговую после обработки посредством ЦАП. На всем промежутке времени работы микропроцессора сигнал остается постоянным, такой способ преобразования называют фиксатором (экстраполятором) нулевого порядка (zero-orderhold). Микросхемы АЦП (ЦАП) характеризуются конечным диапазоном входных (выходных) напряжений и разрядностью. С учетом перечисленных особенностей модель АЦП (ЦАП) может быть собрана из библиотечных модулей Simulink так, как показано на рис. 2.8.

Рис. 2.8. Модель АЦП и ЦАП
Так, например, для 12-разрядного АЦП с диапазоном входных напряжений –5…+5 В параметры блоков следует установить следующим образом (табл. 1).
Таблица 1
|
Блок |
Параметр |
Значение |
|
Gain |
Gain |
2047/5 |
|
Quantizer |
Quantization interval |
1 |
|
Saturation |
Upper limit (Lower limit) |
2047 (–2047) |
|
Zero-Order Hold |
Sample time |
период дискретизации |
Эти параметры устанавливаются средствами встроенного интерфейса каждого блока.
В расчетах регулятор (как устройство) заменяется эквивалентной дискретной моделью, которую для краткости также называют регулятором.
Постановка задачи и исходные данные. Требуется рассчитать частотный
корректор для объекта (2.1), выравнивающий спад АЧХ в высокочастотной области в
пределах одной декады. Период дискретизации ![]() Гц.
Гц.
Предварительные замечания. Поставленную задачу можно решить несколькими способами. Наиболее известные – частотный и модальный. У каждого подхода есть ограничения и недостатки. Частотный подход позволяет оперировать с АЧХ непосредственно, но предназначен только для расчета устойчивых минимально-фазовых звеньев, ограничивая тем самым области расположения нулей и полюсов ПФ. Модальный подход имеет ограничение только на расположение полюсов ПФ, но не дает непосредственного представления об АЧХ. целесообразно использовать оба подхода и сравнить результаты.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.