Министерство образования и науки Российской Федерации
НОВОСИБИРСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Кафедра Автоматики
Лабораторная работа №1
моделирование электроприводов
Факультет: АВТ.
Группа: АА-16
Студент: Шохонов Б.В. Преподаватель: Кондратьев В.А.
Новосибирск, 2005
1. Задание
Для данных выполненного в предыдущем семестре проекта, нацеленного на выбор двигателя, представить в пояснительной записке результаты функционального моделирования привода:
- под заданный график изменения нагрузки с целью уточнения эквивалентных значений моментов и токов по «гладкой составляющей»;
- под выбранные вид и параметры настройки регулятора в различных режимах работы в разомкнутой и замкнутой системах;
Все решения в пояснительной записке иллюстрировать блок-диаграммами, временными диаграммами и выводами.
2. Исходные данные
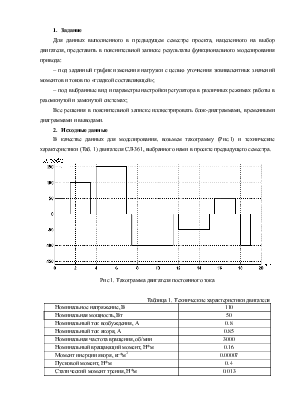
В качестве данных для моделирования, возьмем тахограмму (Рис.1) и технические характеристики (Таб. 1) двигателя СЛ-361, выбранного нами в проекте предыдущего семестра.
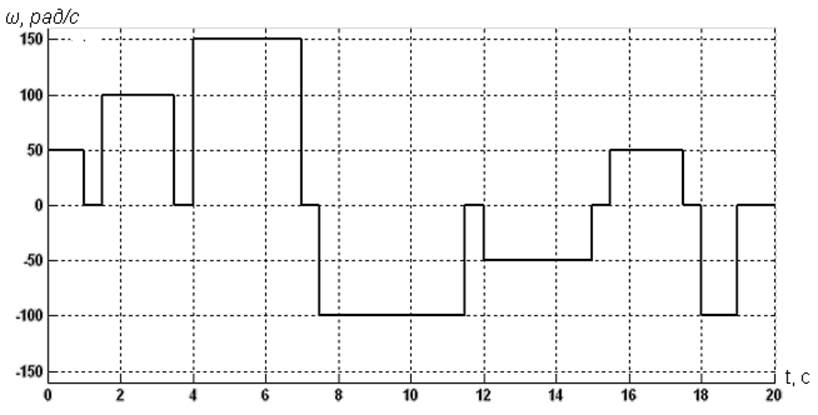
Рис 1. Тахограмма двигателя постоянного тока
Таблица 1. Технические характеристики двигателя
|
Номинальное напряжение, В |
110 |
|
Номинальная мощность, Вт |
50 |
|
Номинальный ток возбуждения, А |
0.8 |
|
Номинальный ток якоря, А |
0.85 |
|
Номинальная частота вращения, об/мин |
3000 |
|
Номинальный вращающий момент, Н*м лдашашаННН*см |
0.16 |
|
Момент инерции якоря, кг*м2 |
0.00007 |
|
Пусковой момент, Н*м |
0.4 |
|
Статический момент трения, Н*м |
0.013 |
|
Сопротивление обмотки возбуждения, Ом ОоОм |
1160 |
|
Сопротивление обмотки якоря, Ом |
20.5 |
|
Коэффициент самоиндукции якоря |
115 |
3. Функциональное моделирование ДПТ НВ
На рис. 2 представлена функциональная модель ДПТ
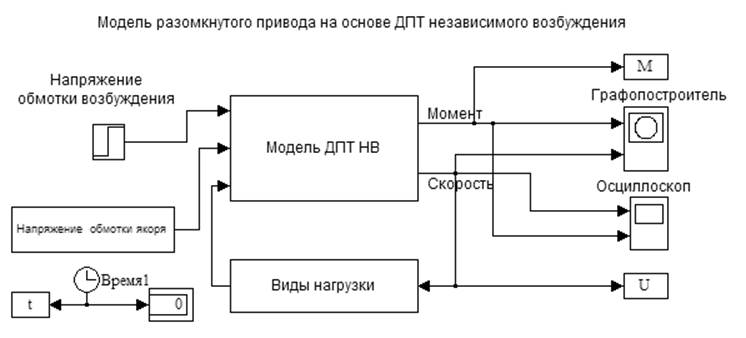
Рис. 2 Модель разомкнутого привода на основе двигателя постоянного тока независимого возбуждения
На рис. 3 представлена диаграмма скорости, развиваемая двигателем.
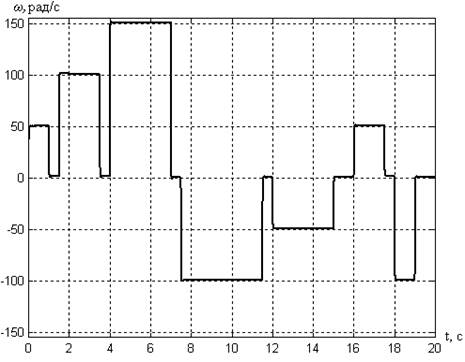
Рис 3 Диаграмма скорости двигателя
На рис 4 представлена диаграмма момента развиваемого двигателем.
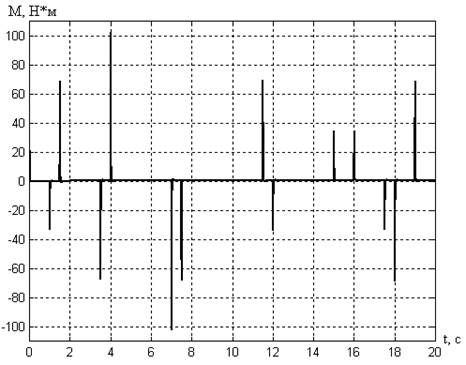
Рис. 4 Диаграмма момента нагрузки в разомкнутой системе
4. Моделирование ДПТ с усилителем мощности на базе ШИП
Виртуальная модель электропривода с широтно-импульсным преобразователем (ШИП) представлена на Рис. 5 Коэффициент усиления служит для согласования выходных величин виртуальной машины и параметров регулятора, рассчитанных в относительных единицах.
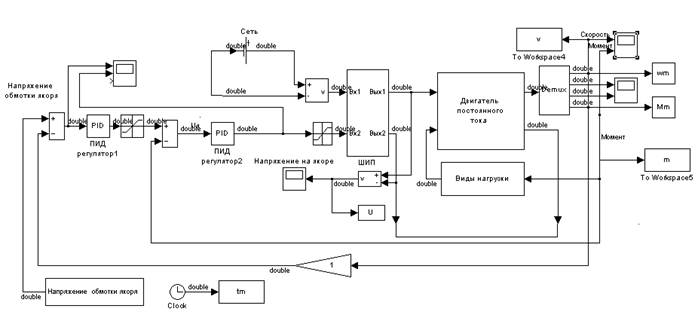
Рис. 5 Виртуальная модель замкнутой системы с ШИП
На Рис. 6 и Рис. 7 представлены полученные диаграммы скорости и нагрузки соответственно.
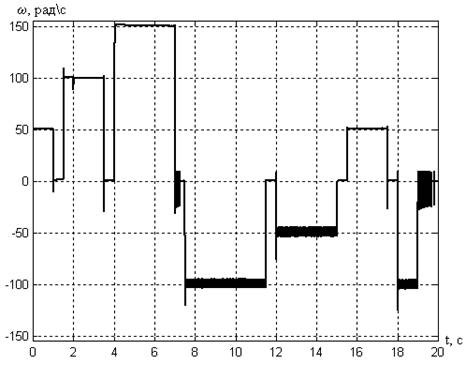
Рис 6 Диаграмма скоростей для ДПТ НВ
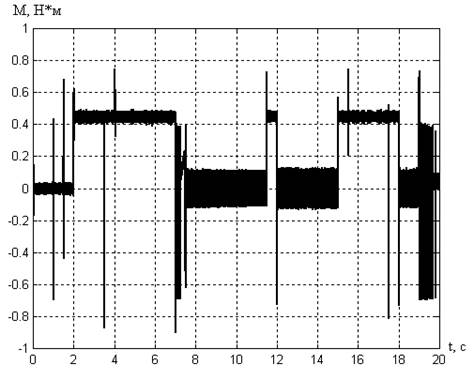
Рис 7 Диаграмма моментов нагрузки
5. Выводы
В данной работе осуществили проектирование регулируемого электропривода путем компьютерного моделирования. Основой для работы служил выполненный в прошлом семестре курсовой проект «Выбор двигателя для системы стабилизации скорости вращения», были проведены синтез и моделирование по «гладкой» составляющей, функциональное моделирование, моделирование с использованием виртуальных моделей. Каждый тип модели позволяет исследовать свойства электропривода для различных режимов его функционирования.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.