












2. Расчёт траектории неуправляемого РС
Во второй главе необходимо решить следующие задачи:
1. составление математической модели полета неуправляемого летательного аппарата и решение ее.
2. расчет дальности полета НЛА по параболической теории.
Для решения поставленных задач и получения траектории движения неуправляемого ЛА необходимо сначала задать исходные данные (параметры ЛА). Параметры неуправляемого ЛА (в системе СИ) в соответствии с вариантом задания на проектирование представлены в таблице 2.1:
|
Калибр d, м |
0,30 |
|
Полная
масса
|
180 |
|
Масса
топлива |
35 |
|
Время горения t, сек |
4 |
|
Длина
направляющих |
2,5 |
|
Коэффициент формы i |
1,80 |
|
Угол
подъема направляющих |
45 |
|
Эффективная
скорость истечения |
2200 |
По данным таблицы 2.1 рассчитываются все остальные необходимые параметры неуправляемого ЛА для расчета его траектории. Результаты этих расчетов представлены в таблице 2.2:
|
Секундный массовый расход q, кг/с |
Тяга R,
|
Коэффициент лобового сопротивления
|
Площадь миделя S,
|
|
8.75 |
19250 |
0,54 |
0,07 |
1. Секундный массовый расход q:
 кг/с
кг/с
2. Тяга двигателя R:
![]()

3. Коэффициент лобового сопротивления ![]() :
:
![]()
где где ![]() - коэффициент
лобового сопротивления эталонного ЛА. Принимаем
- коэффициент
лобового сопротивления эталонного ЛА. Принимаем
где ![]() =0,3
=0,3
4. Площадь миделя ЛА S:
 м2
м2
5. Закон изменения массовой плотности воздуха от
высоты полета принимаем в виде![]() , где
, где ![]() =1,23, высота над уровнем моря Н=7800 м.
=1,23, высота над уровнем моря Н=7800 м.
6.
Закон изменения массы принимаем в виде ![]()
2.1 Модель динамики движения по направляющим, на активном и пассивном участках траектории
Траектория полета неуправляемого ЛА (снаряда РСЗО) состоит из трех характерных участков:
1. движение по направляющим;
2. активный участок полет (когда работает двигательная установка);
3. пассивный участок полета (когда двигательная установка не работает и снаряд движется, как свободно брошенное тело);
Для каждого из этих участков требуются свои начальные условия. Например, для пассивного участка полета начальными условиями будут являться параметры конца активного участка, в свою очередь, начальными условиями для активного будут являться параметры конца участка движения по направляющим.
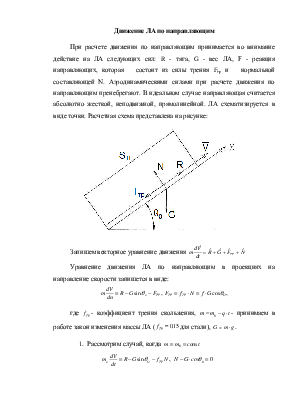
Движение ЛА по направляющим
При расчете движения по направляющим принимается во внимание действие на ЛА следующих сил: R - тяга, G - вес ЛА, F - реакция направляющих, которая состоит из силы трения Fтр и нормальной составляющей N. Аэродинамическими силами при расчете движения по направляющим пренебрегают. В идеальном случае направляющая считается абсолютно жесткой, неподвижной, прямолинейной. ЛА схематизируется в виде точки. Расчетная схема представлена на рисунке:
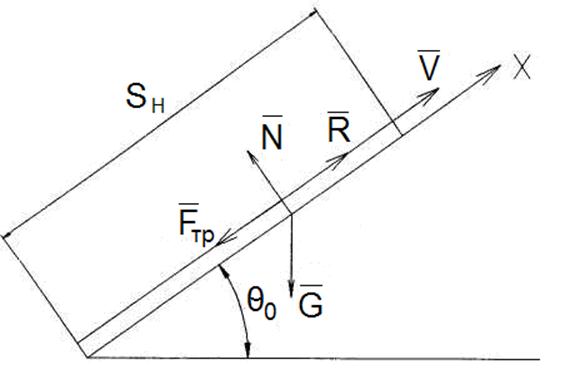
Запишем векторное
уравнение движения 
Уравнение движения ЛА по направляющим в проекциях на направление скорости запишется в виде:
 ,
, ![]() ,
,
где
![]() - коэффициент трения скольжения,
- коэффициент трения скольжения, ![]() - принимаем в работе закон изменения
массы ЛА (
- принимаем в работе закон изменения
массы ЛА (![]() для стали),
для стали), ![]() .
.
1.
Рассмотрим
случай, когда ![]()
 ,
, ![]()

Далее интегрируя выражение, получаем

Учитывая,  получаем
получаем
Находим ![]() через длину направляющей
через длину направляющей ![]() , а потом V:
, а потом V:
 ;
;  ;
; ![]()
2. Рассмотрим
случай, когда ![]()

![]() ,
, ![]()
Отсюда 
Здесь 
Проинтегрировав соотношение, получаем

С учетом ,
вычисляем

где 
Полагая в формулах t=t0
получаем выражение для дульной скорости V0
и длины направляющих ![]() :
:
Vt=t0=V0, St=t0=SH
Если задана длина направляющих, то решая численно уравнение, определяем t0. Если пренебречь изменением массы при движении ЛА по направляющим, то, заменяя массу ЛА средним значением m=m0, получим

 (c)
(c)
 (м/с)
(м/с)
Результаты расчета приведены в таблице 2.3:
|
Дульная скорость V0, м/с |
Дульное время |
Угол наклона |
|
22.24 |
0.22 |
45 |
Активный участок полета.
При расчете траектории неуправляемого ЛА принимаемся за материальную точку переменной массы, которая совпадает с центром масс ЛА. Это эквивалентно допущению, что вращательное движение ЛА относительно центра масс не оказывает влияния на движение центра масс ЛА.
При расчете активного участка полета ЛА принимают следующие допущения:
1. угол атаки равен нулю;
2. тяга R постоянна.
При сделанных допущениях уравнения для расчета траектории ЛА на активном участке полета в проекции на касательную и нормаль к траектории запишутся в виде следующей системы дифференциальных уравнений первого порядка:
Здесь ![]() - сила лобового сопротивления и
- сила лобового сопротивления и ![]() - безразмерный коэффициент лобового
сопротивления,
- безразмерный коэффициент лобового
сопротивления, ![]() - плотность воздуха,
- плотность воздуха,  - площадь миделя соответственно.
- площадь миделя соответственно.
Начальными условиями служат: ![]() ,
, ![]() ,
, ![]() ,
, ![]() .
.
Система является нелинейной и точного аналитического решения не имеет.
Пассивный участок полета.
При расчете пассивного участка полета полагается что:
1. тяга R равна нулю;
2. масса ЛА постоянна ![]()
Тогда уравнения активного участка переходят в уравнения пассивного участка:
Уравнение интегрируется при начальных
условиях ![]() ,
,
![]() ,
, ![]() ,
,
![]() , где
, где ![]() - время конца
активного участка. Основным методом расчета полученной системы уравнений
является численное интегрирование. Расчет ведется до тех пор, когда не
выполнится условие
- время конца
активного участка. Основным методом расчета полученной системы уравнений
является численное интегрирование. Расчет ведется до тех пор, когда не
выполнится условие ![]() =0.
=0.
2.2. Методы и алгоритмы численного интегрирования
Метод Эйлера
Рассмотрим метод Эйлера - линейное приближение, использующее первые два
члена ряда Тейлора. Здесь искомая интегральная кривая аппроксимируется ломаной
линией. Если шаг h достаточно мал, то интеграл в формуле  можно вычислить, используя теорему о
среднем, т.е. вынося подынтегральную функцию из-под знака интеграла средним
значением.
можно вычислить, используя теорему о
среднем, т.е. вынося подынтегральную функцию из-под знака интеграла средним
значением.
В методе Эйлера подынтегральная функция выносится при нижнем пределе
интегрирования: ![]() . Это
приближение геометрически соответствует движению от точки х к точке х+h по касательной к кривой y(x) в точке х.
Запишем расчетные формулы метода Эйлера:
. Это
приближение геометрически соответствует движению от точки х к точке х+h по касательной к кривой y(x) в точке х.
Запишем расчетные формулы метода Эйлера:
![]() ,
, ![]()
![]() ,
, ![]()
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.