качества ПХ (t1с – время первого согласования, tm – время первого достижения максимума, tп – время переходного процесса и перерегулирование s).
Качество работы систем в установившихся режимах оценивается ошибками при воспроизведении типовых управляющих воздействий. Величины ошибок зависят от вида ПФ систем и определяются коэффициентами ошибок, которые для различных систем имеют различные значения. В работе на примере систем различного порядка астатизма (n=0;1;2) определяется величина ошибок при отработке различных типовых воздействий.
Важной характеристикой точности работы заданной системы является степень подавления возмущающего воздействия, приложенного к середине прямого канала передачи сигнала. Если в статической системе от такого воздействия возникает постоянная ошибка, то в системах с астатизмом 1 – 2-го порядка наличие или отсутствие ошибки зависит от расположения интегрирующего звена. В работе путем изучения конкретных систем различной структуры формируется условие, при котором в системах 1 – 2-го порядка астатизма ошибка от возмущающего воздействия будет отсутствовать.
3.3. Программа работы и порядок её выполнения
3.3.1. Исследование статических и динамических характеристик звеньев САУ
1. Интегратор, охваченный ОС.
Вести ПФ интегратора  , где kи выбирается согласно варианту из
табл.3.1:
, где kи выбирается согласно варианту из
табл.3.1:
» Wi = tf (kи, [1 0])
Ввести также три ПФ Wi1, Wi2 и Wi3 по выражению:
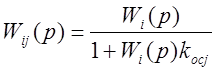
для трех значений kос=1; 0.2; 0.1. Запись каждого из трех ПФ Wij можно осуществить с помощью процедуры feedback в следующем виде:
» Wij=feedback (Wi, kосj), где j = 1 – 3.
Измерить постоянные времени и коэффициенты передачи. Вывести на печать.
2. Инерционное интегрирующее звено с обратной связью.
Ввести ПФ  , где значения kии и Tии заданы в табл. 3.1 согласно
варианту. Записать как и в предыдушем пункте три ПФ по тому же выражению и для
тех же значений kос. Вывести все 4-е ПХ в одно
графическое окно и записать. Измерить коэффициент передачи k, перерегулирование s и время переходного процесса tп для каждой ПФ. Построить зависимости
s= f (kос) и tп
= f (kос).
, где значения kии и Tии заданы в табл. 3.1 согласно
варианту. Записать как и в предыдушем пункте три ПФ по тому же выражению и для
тех же значений kос. Вывести все 4-е ПХ в одно
графическое окно и записать. Измерить коэффициент передачи k, перерегулирование s и время переходного процесса tп для каждой ПФ. Построить зависимости
s= f (kос) и tп
= f (kос).
3. Инерционное звено 2-го порядка с обратной связью.
Выбрать в качестве исходной ПФ звена 2-го порядка ПФ, имеющую небольшую величину коэффициента демпфирования, из числа созданных в предыдущем пункте. Создать дополнительные три ПФ для звена, охваченного ОС с коэффициентом kос = 1; 0.5; 0.1. Создать совместный график 4-х ПХ и вывести его на печать. Измерить перерегулирование s и время переходного процесса tп для каждой ПФ. Построить зависимости s= f (kос) иtп = f (kос).
4. Двойной интегратор с обратной связью.
Записать ПФ двойного интегрирующего звена  и создать
еще три звена, охваченных ОС с коэффициентами kос = 1; 0.2; 0.1. Величина k2и из табл. 3.1. Выполнить процедуру совместного
построения ПХ всех четырех звеньев и вывести их на печать. Измерить амплитуду и
частоту сигналов и построить зависимости A = f (kос)
иw = f (kос).
и создать
еще три звена, охваченных ОС с коэффициентами kос = 1; 0.2; 0.1. Величина k2и из табл. 3.1. Выполнить процедуру совместного
построения ПХ всех четырех звеньев и вывести их на печать. Измерить амплитуду и
частоту сигналов и построить зависимости A = f (kос)
иw = f (kос).
Таблица 3.1
N |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|
kи |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|
kии |
3,5 |
4 |
4,5 |
5 |
5,5 |
6 |
6,5 |
7 |
7,5 |
8 |
|
Tии |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|
k2и |
10 |
9 |
8 |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
3.3.2. Исследование точности систем
при отработке типовых управляющих воздействий
1. Точность при отработке единичного ступенчатого воздействия.
Записать ПФ разомкнутых систем с астатизмом различного порядка:
n = 0 
n = 1 
n = 2 
» W1=tf(k,[1 1]);
» W2=tf(k,[1 1 0]);
» W3=tf([10*k k],[1 1 0 0]);
Получить на одном графике ПХ замкнутых систем для трех ПФ. Отметить величину ошибки в установившемся режиме каждой системы. Определить характер ПХ, рассчитав величину коэффициента демпфирования. Вывести график на печать.
2. Точность при отработке единичного скачка скорости.
Преобразовать ПФ, заданные в п.1, в ПФ систем, замкнутых единичной отрицательной ОС:
» Wi = feedback (Wi, 1) , где i = 1 – 3.
Умножить каждую ПФ на 1/p:
» W = tf (1,[1 0]);
» Wi = Wi * W
Вывести на общий график 4-е ПХ
разомкнутых систем: для  и для трех Wi(p). Измерить ошибку
каждой системы в установившемся режиме и сравнить с расчетной величиной.
Отметить характер переходного процесса. Вывести график на печать.
и для трех Wi(p). Измерить ошибку
каждой системы в установившемся режиме и сравнить с расчетной величиной.
Отметить характер переходного процесса. Вывести график на печать.
3. Точность при отработке единичного скачка ускорения.
Преобразовать все 4-е ПФ: W, W1, W2, W3 умножением каждой на 1/p. Вывести на общий график 4-е ПХ разомкнутых систем. Определить ошибки систем в установившемся режиме. Вывести график на печать.
3.3.3. Исследование точности систем по отношению
к возмущающему воздействию
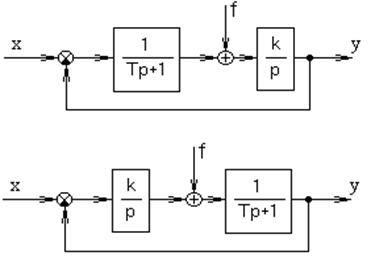
1.
|
a)
б)
рис. 3
Варианты k и T заданы в табл. 3.3.
Определить ПФ замкнутых систем по возмущающему воздействию и ввести
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.