Рис. 3.3
Электромеханической характеристикой двигателя при питании от выпрямителя называется зависимость среднего значения скорости двигателя от среднего значения постоянной составляющей тока якоря.
Рассчитаем электромеханические характеристики при ![]()
Механической характеристикой двигателя при питании от выпрямителя называют зависимость среднего значения скорости от среднего значения момента.
![]()
Для ДПТ с НВ электромеханические и механические совпадают, имея различие лишь в масштабе.
Характеристики показаны на рис.4.1
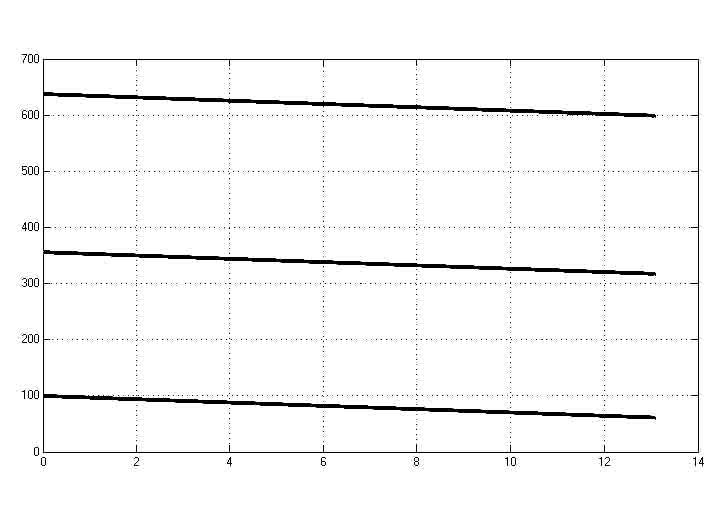
Рис.4.1 Электромеханические и механические характеристики АЭП
Нам задан закон изменения Uу:
![]()
Закон изменения представлении на рис.5.1
Рис. 5.1 Закон изменения Uу=f(t)
Характеристика управления выпрямителем:
Для нашей схемы угол ![]() равен:
равен:
отсюда:
Подставив заданный закон изменения Uу получим требуемую зависимость Еу=f(t) представленную на рис 5.1. Расчетные данные представлены в табл. 5.2
Таблица 5.2 Зависимость Еу=f(t)
|
10 |
8,9 |
7,8 |
6,7 |
5,6 |
4,5 |
3,4 |
2,3 |
1,2 |
0,1 |
|
198 |
192,15 |
175,3 |
149,4 |
117,61 |
83,6 |
51,39 |
24,8 |
7 |
0,05 |
Рис. 5.2 Закон изменения Еу=f(t)
Схема регулятора тока представлена на рис 6.1
Рис. 6.1 ПИ-регулятор тока.
Передаточная функция этого звена
Wр.т = (Тр.т × р + 1) / Ти.т × р;
Постоянная времени регулятора тока
Тр.т = Тя = Lяц / Rяц , где Lяц - индуктивность якорной цепи, Гн;
Rяц - активное сопротивление якорной цепи, Ом;
Rяц = Rя + Rд.п где Rя - активное сопротивление якоря; Rя = 0.6 Ом;
Rд.п - активное сопротивление добавочных полюсов ; Rд.п = =0.35 Ом;
Rяц = 0,6 + 0,35 = 0.95 Ом
Lяц = Lя + Lс.д,
Lя - индуктивность якоря; Lя =12 мГн;
Lс.д - индуктивность сглаживающего дросселя; Lс.д = 80 мГн;
Lяц = 0,012 + 0.08 = 0,092 мГн
Тр.т = 0,092/0,95 = 0,0968
Можно представить, что Тр.т = Rоу×Соу.
Зададимся Соу = 2.2 мкФ и следовательно
Rоу = 0,0968/2.2×10-6 = 44019,14 Ом. По справочнику берем Rоу = 47 кОм
Ти.т = 2×Кот×Кир×2Тm3/ Rяц;
где Кот - коэффициент передачи обратной связи по току;
Кир - коэффициент усиления выпрямителя;
Тm - малая постоянная времени;
Тm = 1 / m`×f1 = 1 / 3×50 = 0.007;
В качестве Кир принимается максимальное значение динамического коэффициента усиления выпрямителя для пилообразного опорного напряжения по формуле :
Кв.д = (p / Uпм)×Ео=62,225
Кот = Uз.т.мax /km Iя.мax = 10 / 2×12,71 = 0,39;
где, km=2 — коэффициент перегрева двигателя в течении 60 секунд.
Ти.т = 0,39 62,225 2 0,007/ 0,95 = 0,358
Так же Ти.т = Rос×Соу ,следовательно
Rос = 0,358 / 2.2×10-6 =162559,09 Ом .По справочнику берем Rос= 200 кОм.
Для дальнейших расчетов зададимся ,что Uз.т.м = Uос.м и теперь можно принять, что Rос = Rзт.
Перечень элементов схемы
|
Поз. обозначение |
Наименование |
Кол. |
|
Конденсатор |
||
|
Соу |
К50-16-25В-0.22мкФ |
1 |
|
Микросхема |
||
|
DA3 |
К140УД7 |
1 |
|
Резисторы |
||
|
Rос,Rзт |
МЛТ-0.125-200кОм±5% |
2 |
|
Rоу |
МЛТ-0.125-47кОм±5% |
1 |
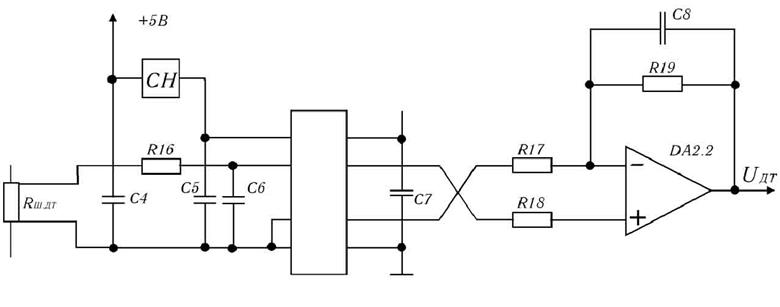
Рис 6.2 Датчик тока.
В данной работе в качестве датчика тока используется шунт:
![]()
где Iян=12,71 А
Из справочника выбираем шунт с Iш =15А.
Выбираем шунт типа LVR-3.01-1%.
Справочные данные: Pm =3W.Rш=10мОм.
Чтобы разделить потенциалы силовой части ЭП и СУЭП, применим гальваническую развязку на основе микросхемы HCPL-7840
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.