7.Синтез функциональной схемы СУЭП. Выбор и расчет основных элементов ЭП
Структура САУ может быть разомкнутой или замкнутой (одноконтурной и многоконтурной).
Одноконтурная структура имеет одну главную отрицательную связь по выходной координате, охватывающую все звенья прямого канала. Корректирующие устройства таких систем обычно включаются последовательно со звеньями прямого канала и совместно с обратной связью образуют регулятор. Критериями качества работы системы в этом случае являются заданные значения перерегулирования и быстродействия в переходном процессе, а также статизма характеристик в установившемся режиме.
Многоконтурные системы характеризуются наличием, кроме главной отрицательно обратной связи, еще n внутренних обратных связей по переменным состояния. Синтезируемые таким образом структуры, обладая достаточно высокими качественными показателями переходных процессов гарантируют заданную точность регулирования при применении лишь астатического регулятора выходной величины или компенсации возмущений.
Из статических характеристик разомкнутой системы определим статизм. Для этого найдем отношение изменения скорости к скорости холостого хода:

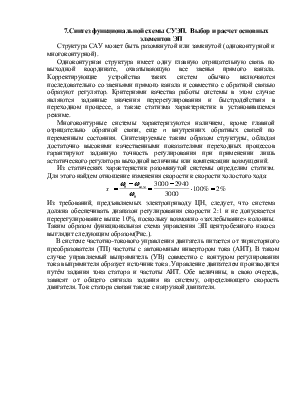
Из требований, предъявляемых электроприводу ЦН, следует, что система должна обеспечивать диапазон регулирования скорости 2:1 и не допускается перерегулирование выше 10%, поскольку возможно «захлебывание» колонны. Таким образом функциональная схема управления ЭП центробежного насоса выглядит следующим образом(Рис.).
В системе частотно-токового управления двигатель питается от тиристорного преобразователя (ТП) частоты с автономным инвертором тока (АИТ). В таком случае управляемый выпрямитель (УВ) совместно с контуром регулирования тока выпрямителя образует источник тока .Управление двигателем производится путём задания тока статора и частоты АИТ. Обе величины, в свою очередь, зависят от общего сигнала задания на систему, определяющего скорость двигателя. Ток статора связан также с нагрузкой двигателя.
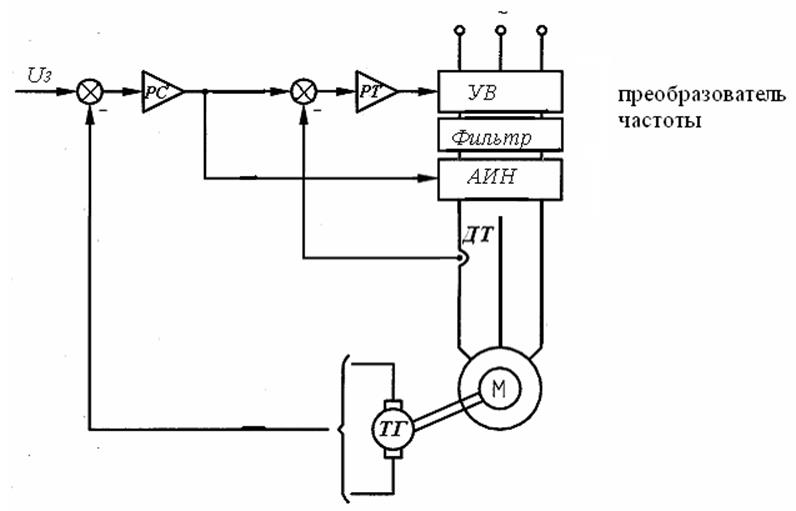
Рис.7. Функциональная схема ЭП.
АИ – автономный инвертор;
ДТ – датчик тока;
ТГ – тахогенератор;
УВ – управляемый выпрямитель;
РС – регулятор скорости;
РТ – регулятор тока
М- АД с КЗ.
Принцип работы данной системы заключается в следующем: в контуре скорости напряжение задания Uз сравнивается с напряжением поступающем с датчика скорости, который реализуется на тахогенераторе,пропорциональным скорости асинхронного двигателя. На основе разности напряжений регулятор скорости РС формирует сигнал управления АИТ. Последний в свою очередь задает частоту тока статора. Выходной сигнал поступает на регулятор тока РТ и сравнивается с током статора, измеренного с помощью датчика тока ДТ (трансформатор тока). Отрицательная обратная связь по току обеспечивает необходимую точность контура тока. Выходной сигнал регулятора тока поступает на управляемый выпрямитель УВ, где формируется закон изменения тока статора. Регулятор скорости воздействует на автономный инвертор тока, а регулятор тока – на управляемый выпрямитель. Подобное разделение позволяет обеспечить высокое качество переходных процессов.
Перейдем к определению настроек регуляторов.
Для этого для начала синтезируем сам двигатель. Передаточную функцию асинхронного двигателя с КЗ ротором в общем случае можно записать в виде произведения апериодического звена первого порядка и интегрирующего звена:
 где: Тэ=0,00995 и Тм=0,02-
электрическая и механическая постоянные
где: Тэ=0,00995 и Тм=0,02-
электрическая и механическая постоянные
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.